

Autonomously identifying and capturing method of non-cooperative target of space robot
A technology of non-cooperative targets and space robots, which is applied in the field of autonomous identification and capture of non-cooperative targets of space robots, and can solve problems such as system instability and low autonomy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] 1. The main process of the autonomous recognition and capture method of non-cooperative targets by space robots
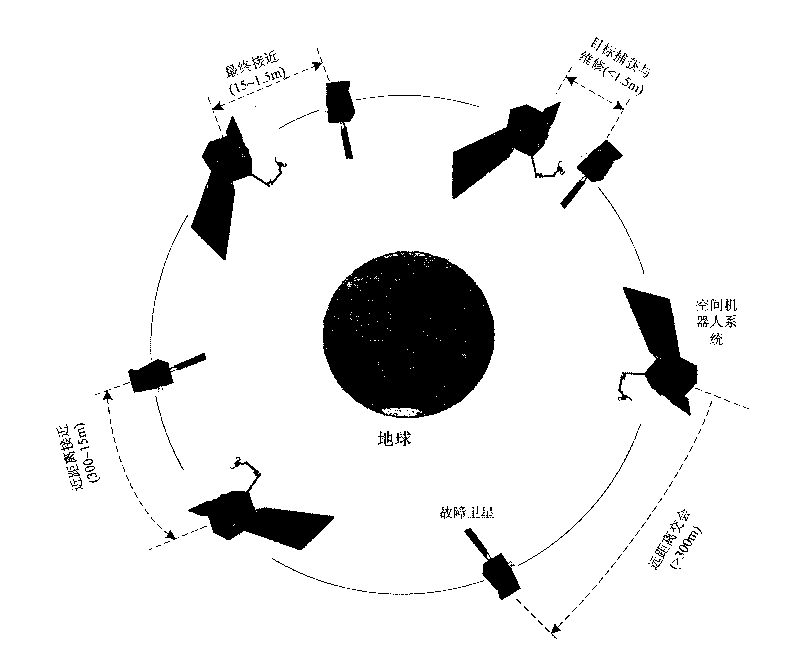
[0047] The typical space robot on-orbit service idea is as follows: figure 1 As shown, the space robot system is used to track, approach, capture, dock, repair and other operations on the faulty satellite. The on-orbit service process can be roughly divided into the following stages:
[0048] (a) Long-distance tracking approach (>300m): the space robot system maneuvers from its own orbit to a position about 300m away from the target satellite;
[0049] (b) Medium distance tracking approach: the space robot system maneuvers from 300m to a position about 15m away from the target satellite;
[0050] (c) Proximity rendezvous and docking: the space robot system maneuvers from a position of about 15m to a position of about 1m, and performs relative docking so that the target satellite is in the working space of the manipulator;
[0051] (d) On-orbit capture and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More