

Three degree of freedom parallel robot mechanism
A robot and degree-of-freedom technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficult working points, achieve simple kinematics, easy control and calibration, and reduce complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Further description will be given below through the embodiments shown in the accompanying drawings.
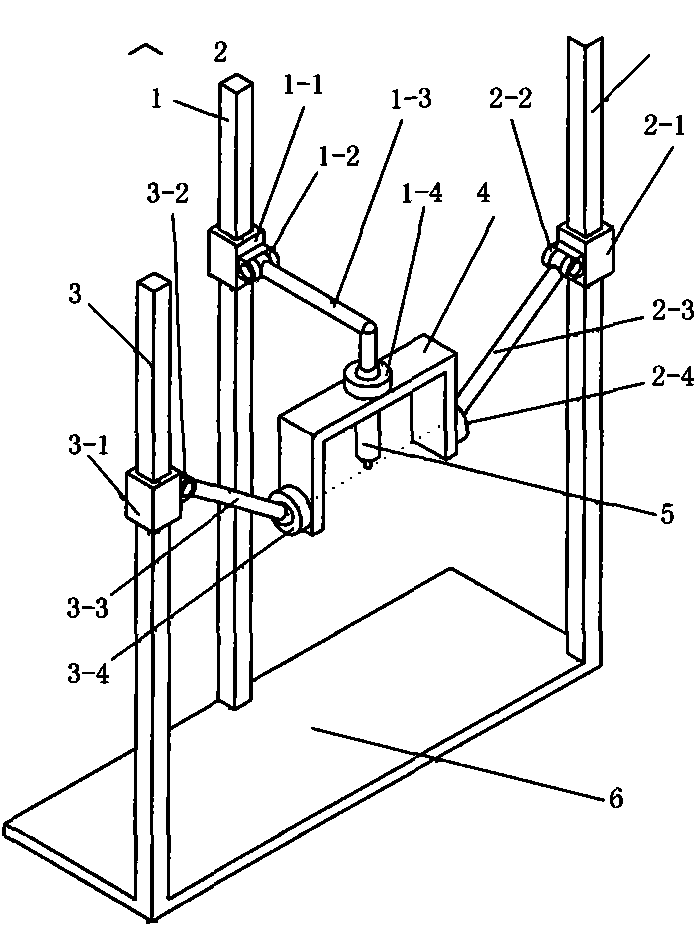
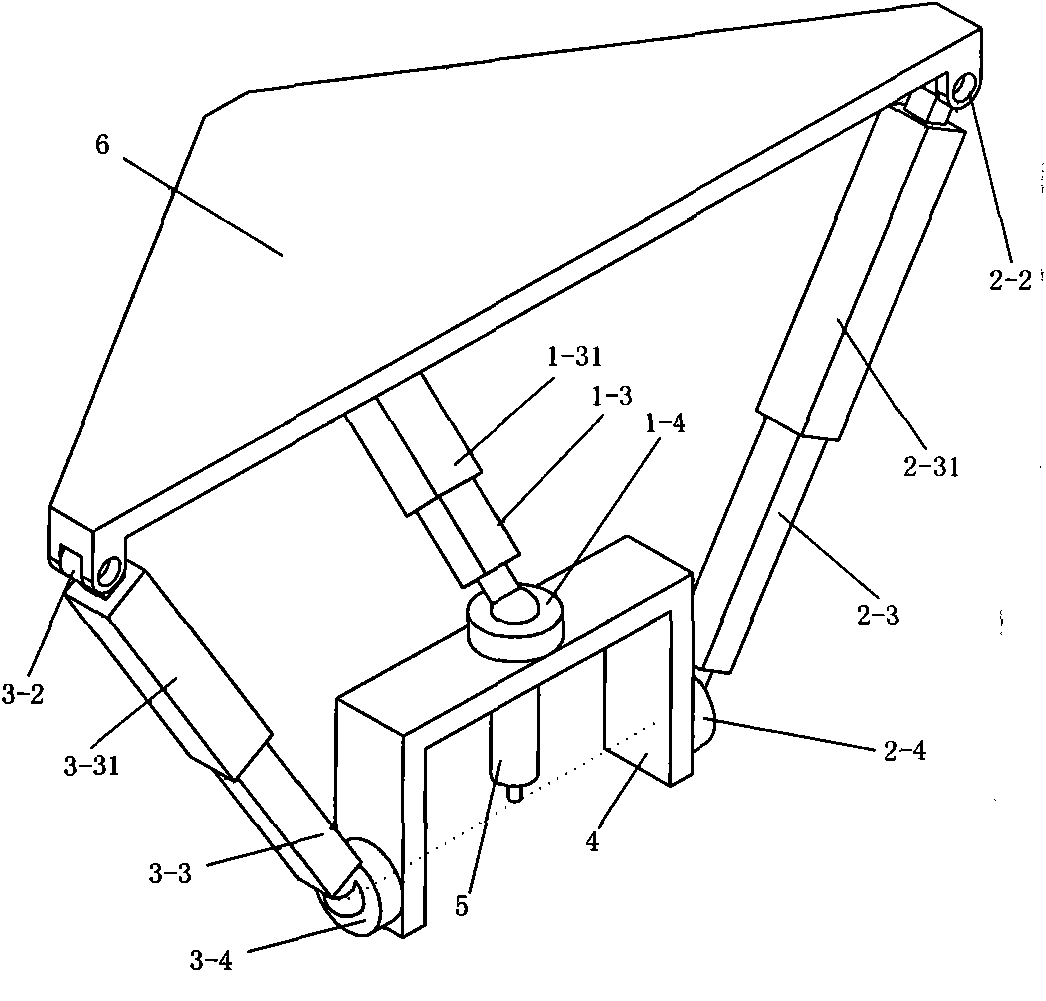
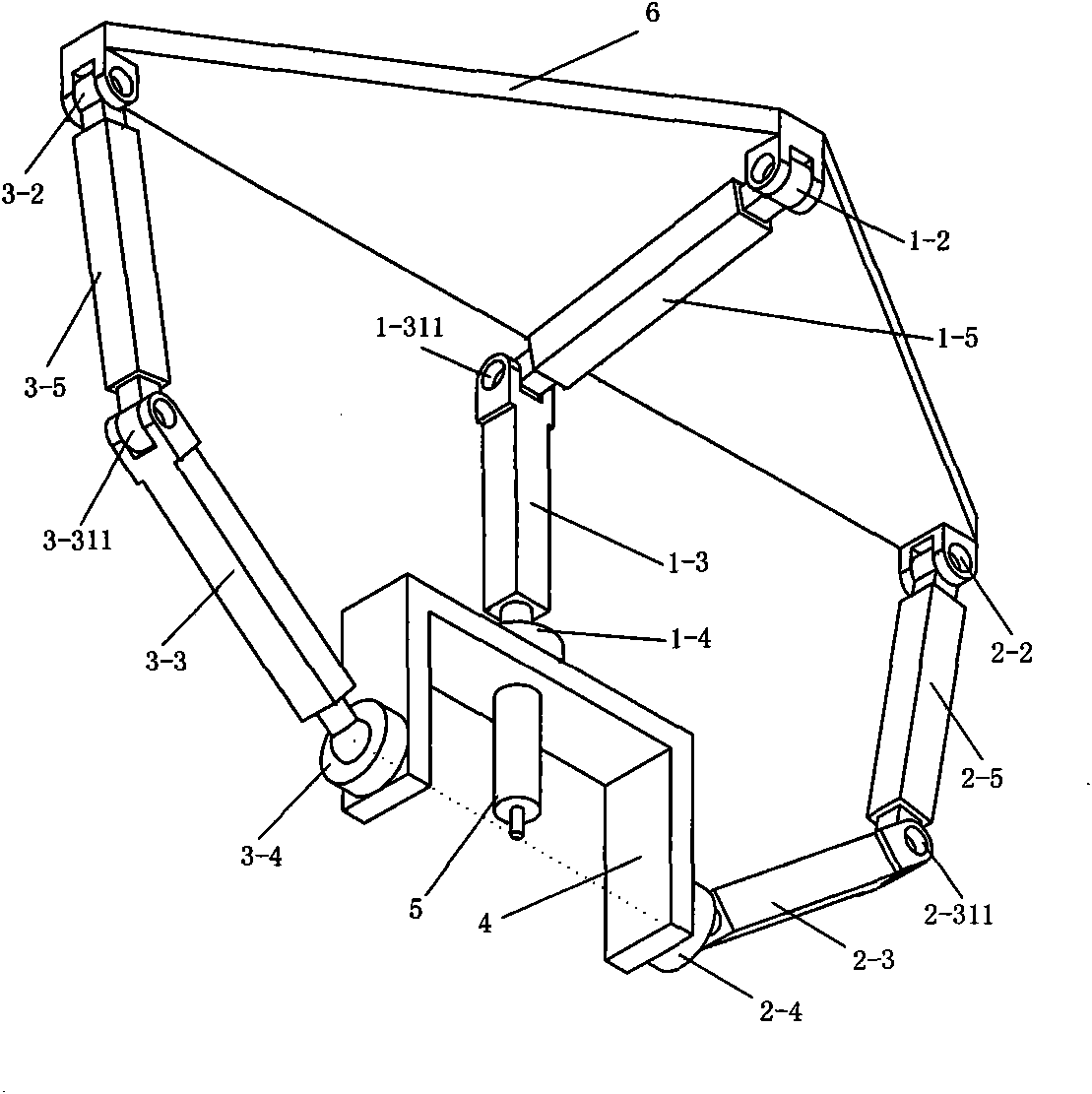
[0020] The embodiments shown in the three drawings all include a moving platform 4, a fixed platform 6, and three branches connecting the moving platform and the fixed platform; the three branches have identical structures, and the motion planes of the left and right branches overlap and are symmetrical about the moving platform Distribution, the movement plane of the middle branch coincides with the symmetry plane of the left and right branches; each branch is provided with at least one revolving pair, a connecting rod and a spherical hinge; the tool 5 is located below the moving platform and is perpendicular to the moving platform; on this basis, each The differences of the examples are:
[0021] Add A: Each branch is also equipped with a moving pair driven by a motor; the moving pair is directly installed on the fixed platform, and the moving platform is connected wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More