

Teleoperation task planning and simulation method for mechanical arm/dexterous hand system
A task planning and teleoperation technology, applied in the field of teleoperation, can solve the problems of subtle operation process, reduced work ability and task quality, cumbersome and other problems, and achieve the effect of long operation time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
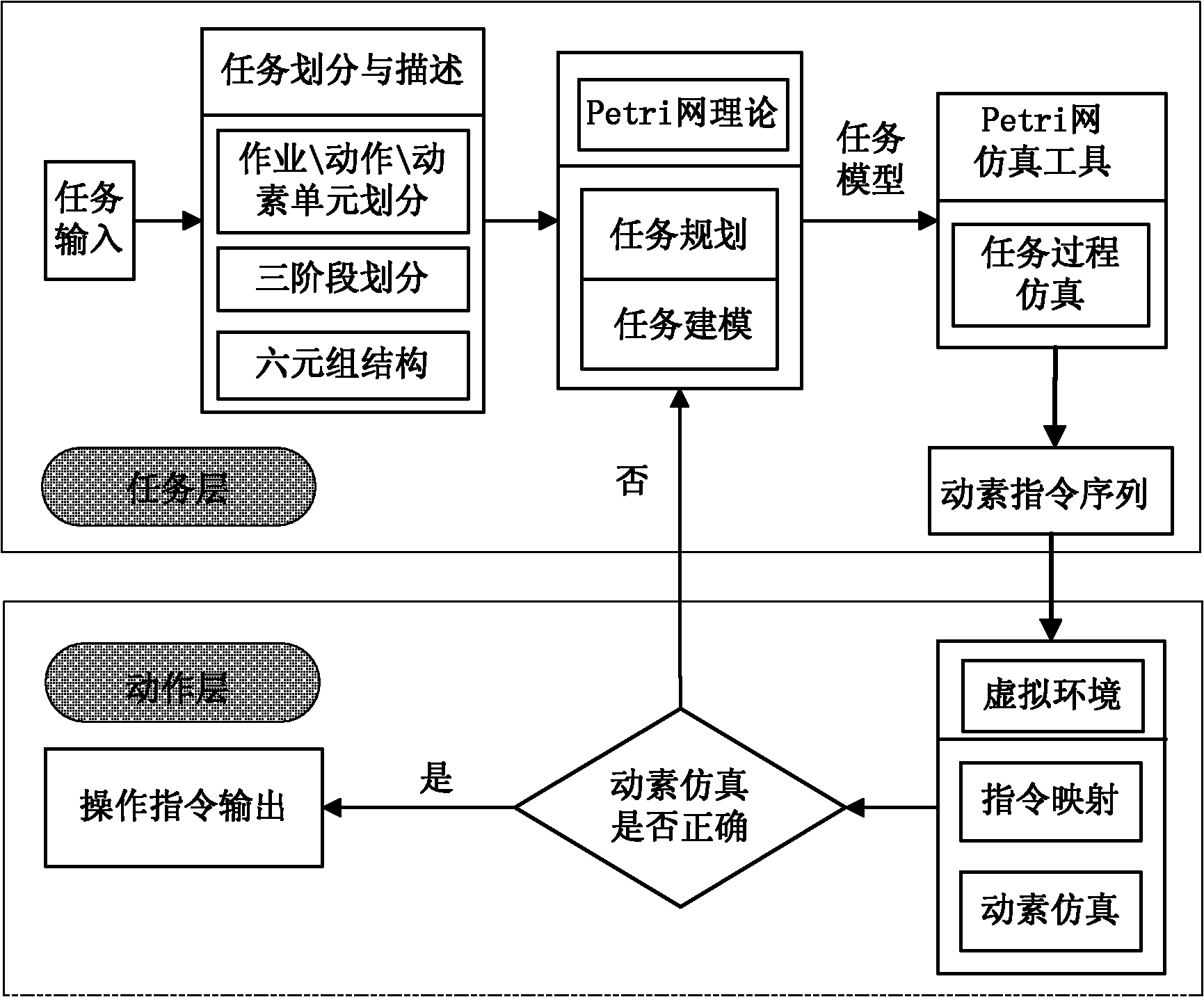
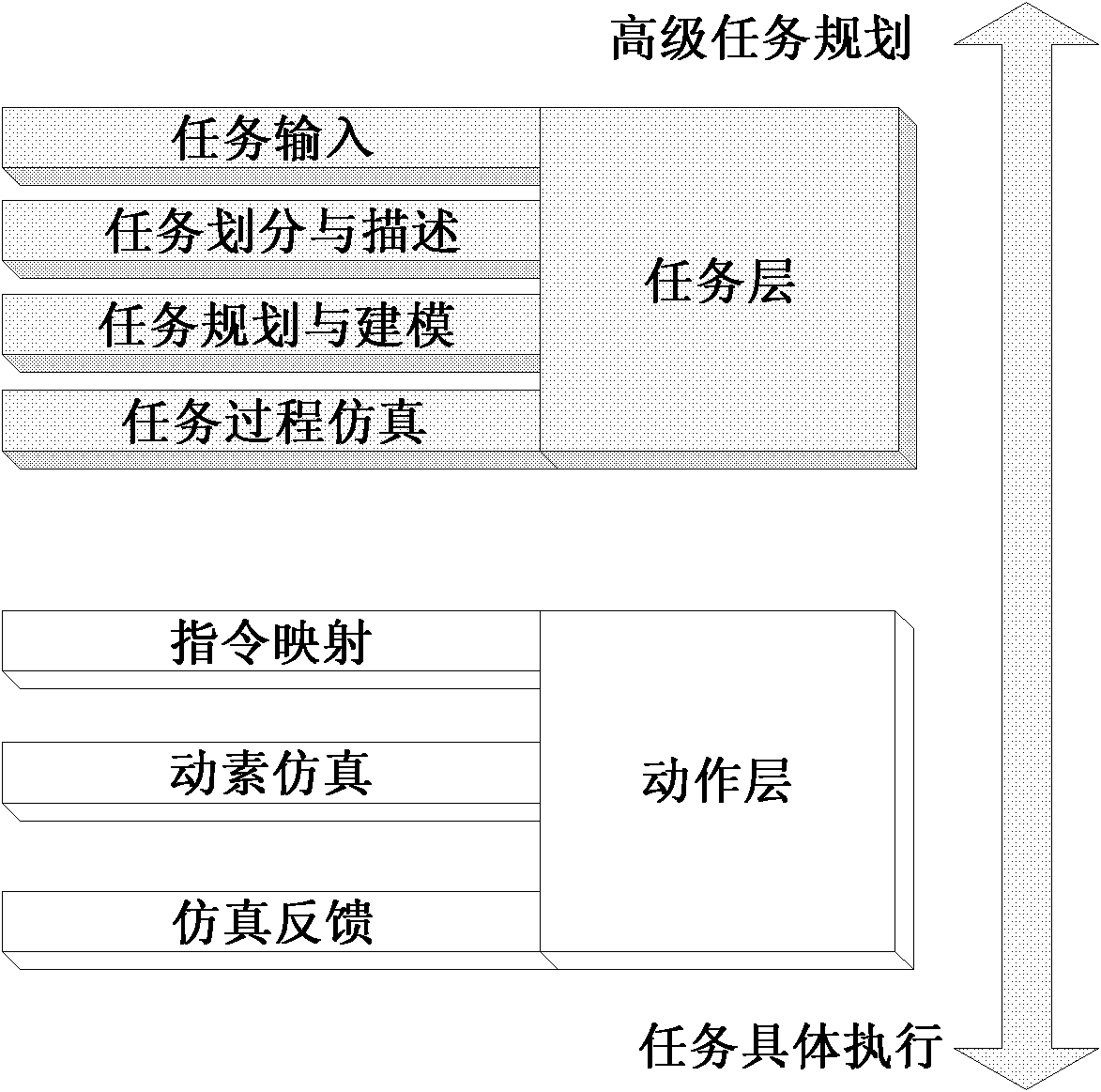
[0027] The present invention includes operation, action and kinetic element analysis method, task three-stage division method, task six-tuple structure description method, two-layer planning method of remote operation task simulation and five stages of task layer simulation planning optimization, which are realized through the above processes The reasonable planning and optimized simulation of complex teleoperation tasks are achieved, and the purpose of predicting and guiding the actual teleoperation is achieved.
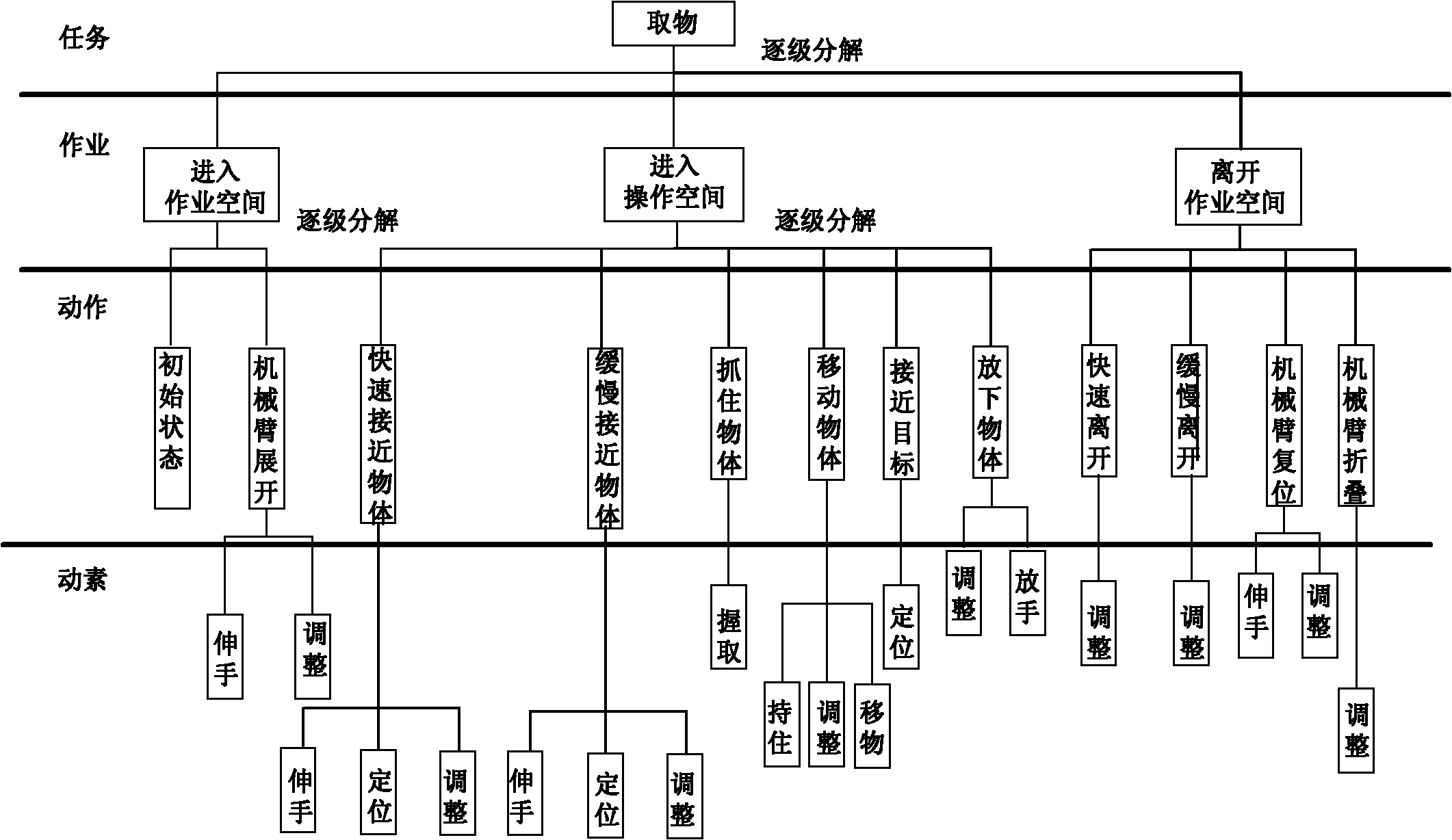
[0028] The above analysis of tasks, actions, and motive elements is aimed at different levels of tasks, using work research theory, to divide tasks according to different granularities. granularity. Tasks at each level are composed of more fine-grained tasks (or operational elements) at the lower level. The division composed of parent ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More