

Strap-down inertial navigation system large azimuth misalignment angle initial alignment method based on MRUPF (Multi-resolution Unscented Particle Filter)
A strapdown inertial navigation and initial alignment technology, which is used in navigation, measurement devices, instruments, etc. through velocity/acceleration measurement, and can solve problems such as large amount of calculation, long initial alignment time, and poor real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
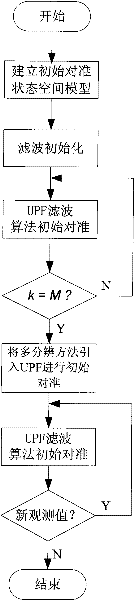
[0026] Such as figure 1 As shown, the present invention uses MRUPF nonlinear filtering to solve the initial alignment problem of the static base of the strapdown inertial navigation system under a large azimuth misalignment angle, and the specific steps are as follows:
[0027] 1. Establish the state space model of the initial alignment of the static base of the strapdown inertial navigation system with a large azimuth misalignment angle
[0028] In the strapdown inertial navigation system, the velocity and attitude angle error equations for initial alignment are:
[0029] Δ V · = ( I - C t p ) f ‾ p - δ f t - ▿ t - - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More