

Underwater carrier initial alignment method based on DVL assistance and vector truncation K matrix
A technology of initial alignment and matrix, applied in measurement devices, instruments, etc., to avoid traditional traps, improve initial alignment accuracy, and speed up convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
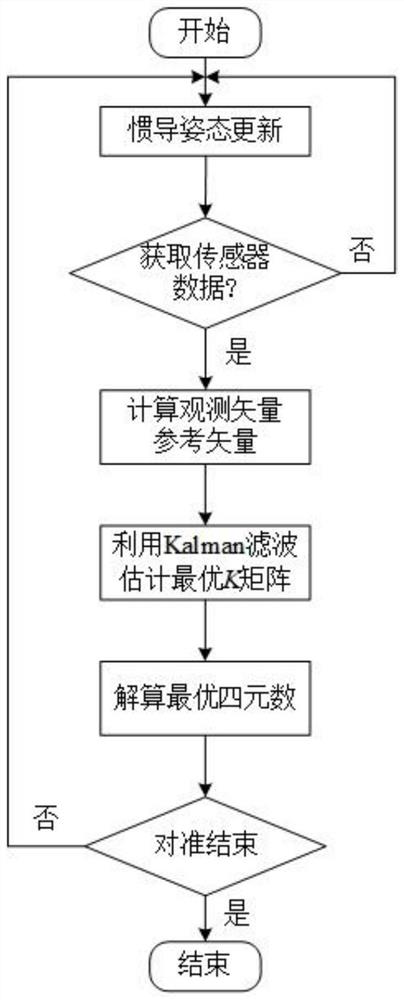
[0107] The present invention takes AUV as an example, adopts the underwater vehicle initial alignment method based on DVL assistance and vector truncated K matrix to implement the specific process, first defines the reference standard coordinate system required for the solution, and obtains inertial sensor data and DVL real-time data , and preprocess the data to calculate the observation vector ξ and the reference vector r; establish the matrix state equation and measurement equation of the system; use the zero trace and symmetry of the K matrix to vectorize the matrix state equation and measurement equation Truncation; then use Kalman filter to filter to obtain the optimal estimated K matrix; finally extract the optimal quaternion from the optimal estimated K matrix, use the attitude matrix chain rule to obtain the current attitude matrix, and then calculate the loss alignment angle to complete the initial alignment process.
[0108] Such as figure 1 As shown, the present in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More