

A method for controlling a plurality of axes in an industrial robot system and an industrial robot system
An industrial robot and axis technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as danger, and achieve the effect of reducing cycle time and reducing hardware costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
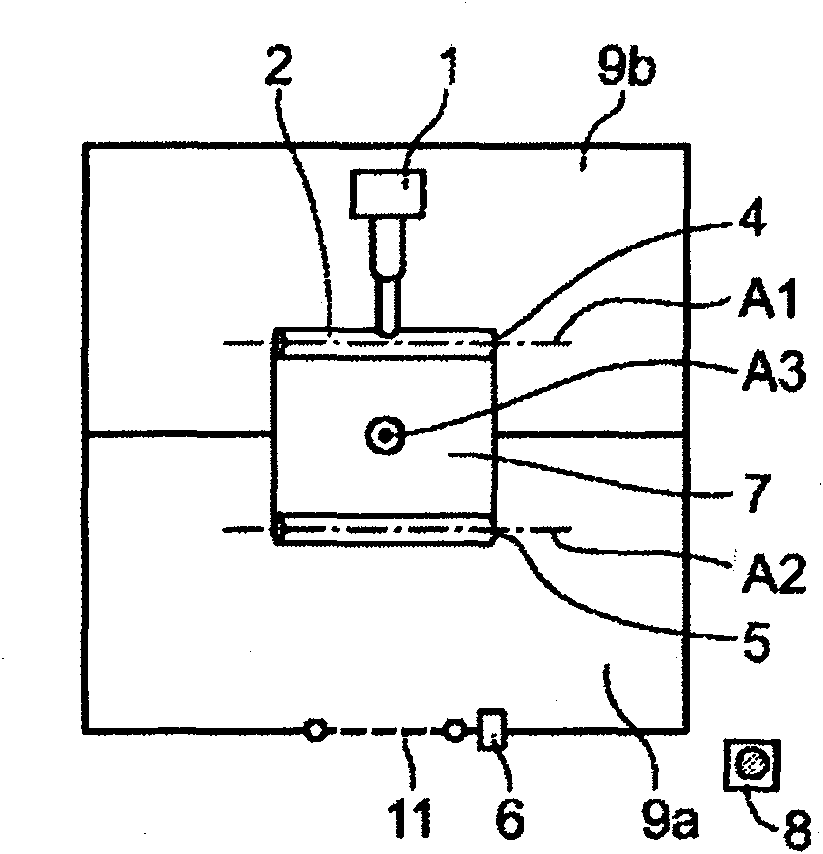
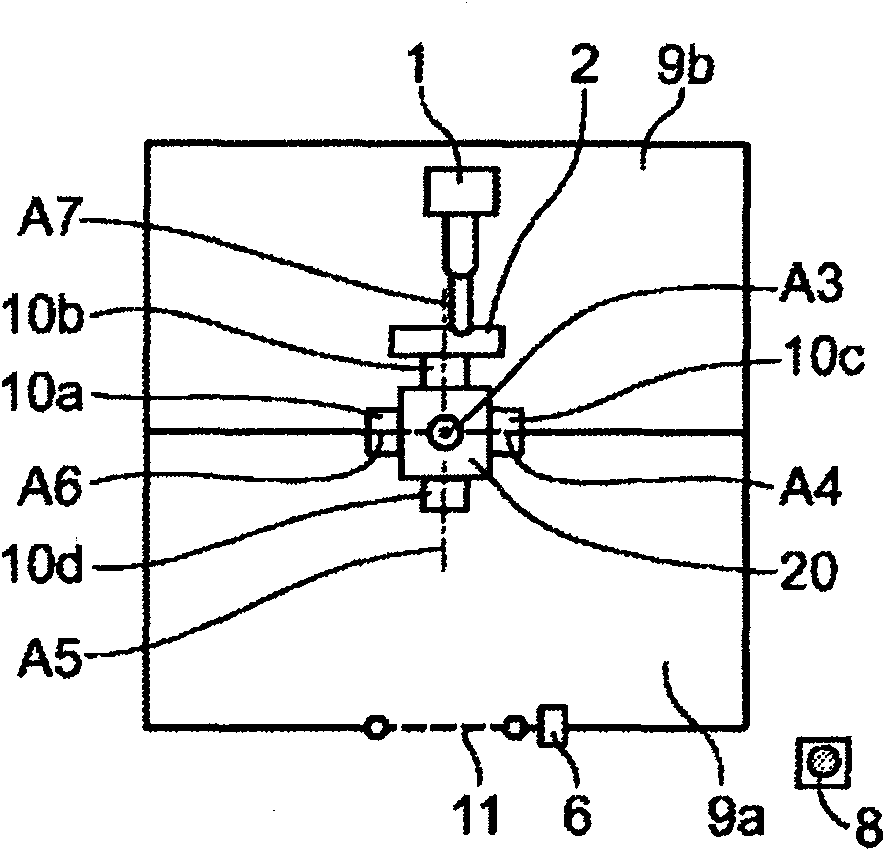
[0049] Figure 7 shows a robot control system according to an embodiment of the invention, which is adapted to control Figure 1-5 The axis of the positioner and the station changer in the work cell disclosed in . However, the number of drive units, motors, position measuring devices must be adapted to the number of positioners of the working unit type. Multiple motors M 1 , M 2 , M 3 Realize the movement of positioner and position converter. For example, refer to figure 1 Work unit shown, motor M 1 Control axis A of the first positioner 1 ;Motor M 2 Control axis A of the first positioner 2 、A 1 movement; motor M 3 Axis A of the control position converter 3 exercise. Each axis has a measuring axis position Φ 1 、Φ 2 、Φ 3 device R 1 , R 2 , R 3 . The device for measuring the position of the axis is, for example, a resolver.
[0050] The control system includes an axis controller 50 adapted to control the axis movement of the station changer and positioner. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More