

Implementation method of force telepresence of telerobotics based on integration of virtual strength and real strength
An implementation method and a technology of presence, applied in the field of control, can solve problems such as limited transmission bandwidth, achieve the effect of reducing communication bandwidth requirements and reducing the impact of instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The embodiments of the present invention will be further described in detail below, but the protection scope of the technical solution of the present invention is not limited to the following embodiments.
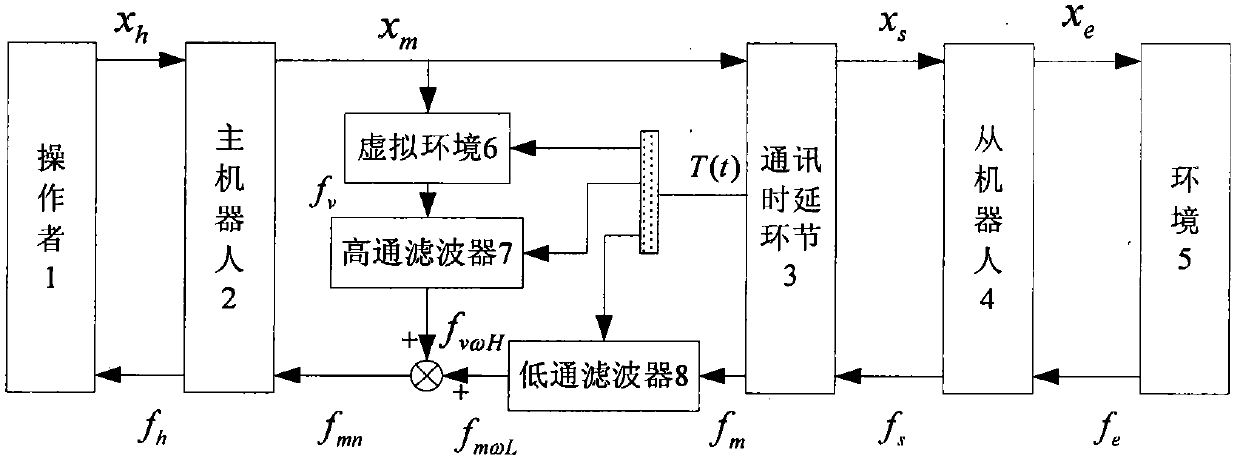
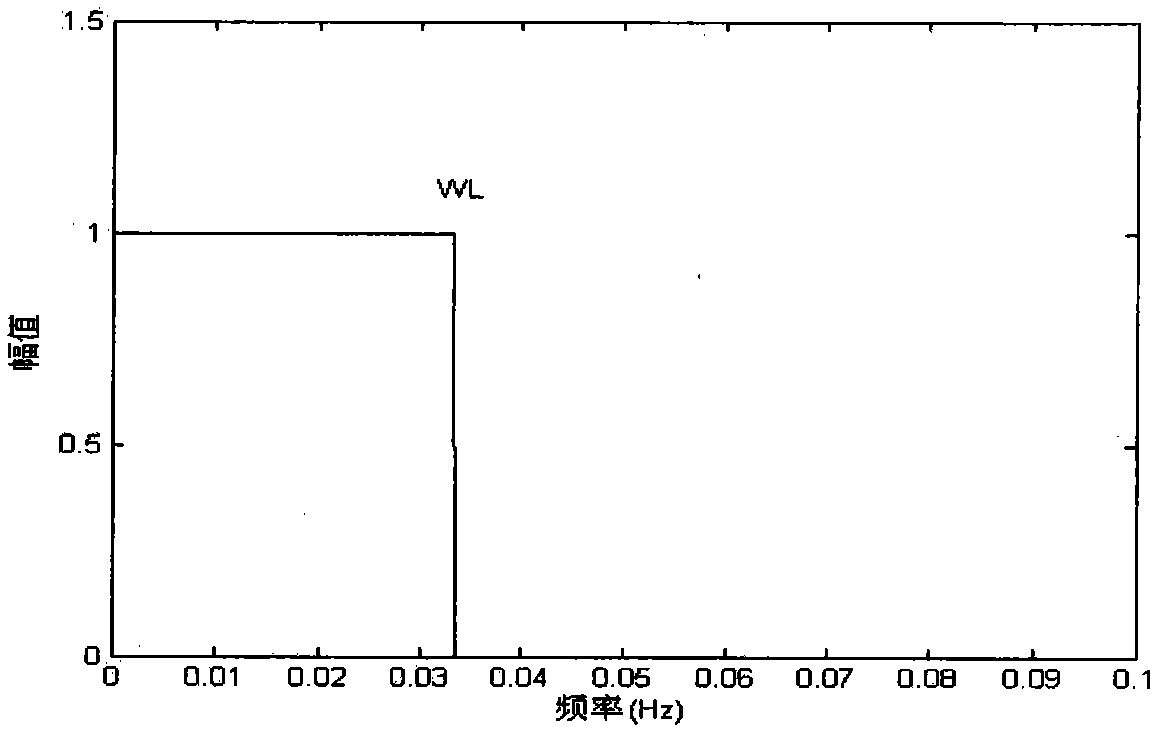
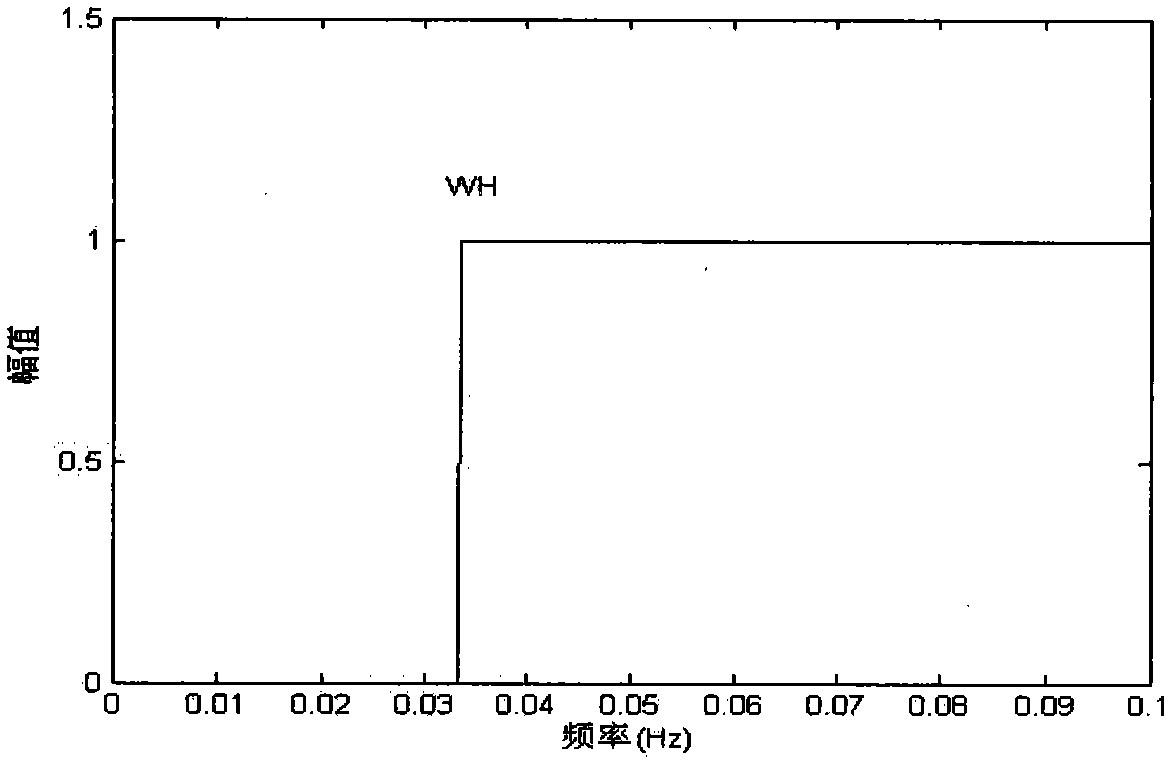
[0027] The control structure of the present invention is composed of a master robot, a communication delay link, a slave robot, an environment, a virtual environment between the master robot and the communication delay environment, a high-pass filter and a low-pass filter.
[0028] The establishment of the virtual environment is to simulate the real environment as accurately as possible based on prior knowledge, but in the process of interacting with the environment, there will always be errors between the real environment and the real environment due to modeling uncertainties, time delay and other issues. Let the real environment model be x is the position variable, the error of the virtual force feedback of the virtual environment is a random noise proportional to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More