

Parallel robot
A robot and parallel technology, applied in the direction of manipulator, mechanical equipment, program control manipulator, etc., can solve the problems of complex structure, difficult control and high manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The parallel robot of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
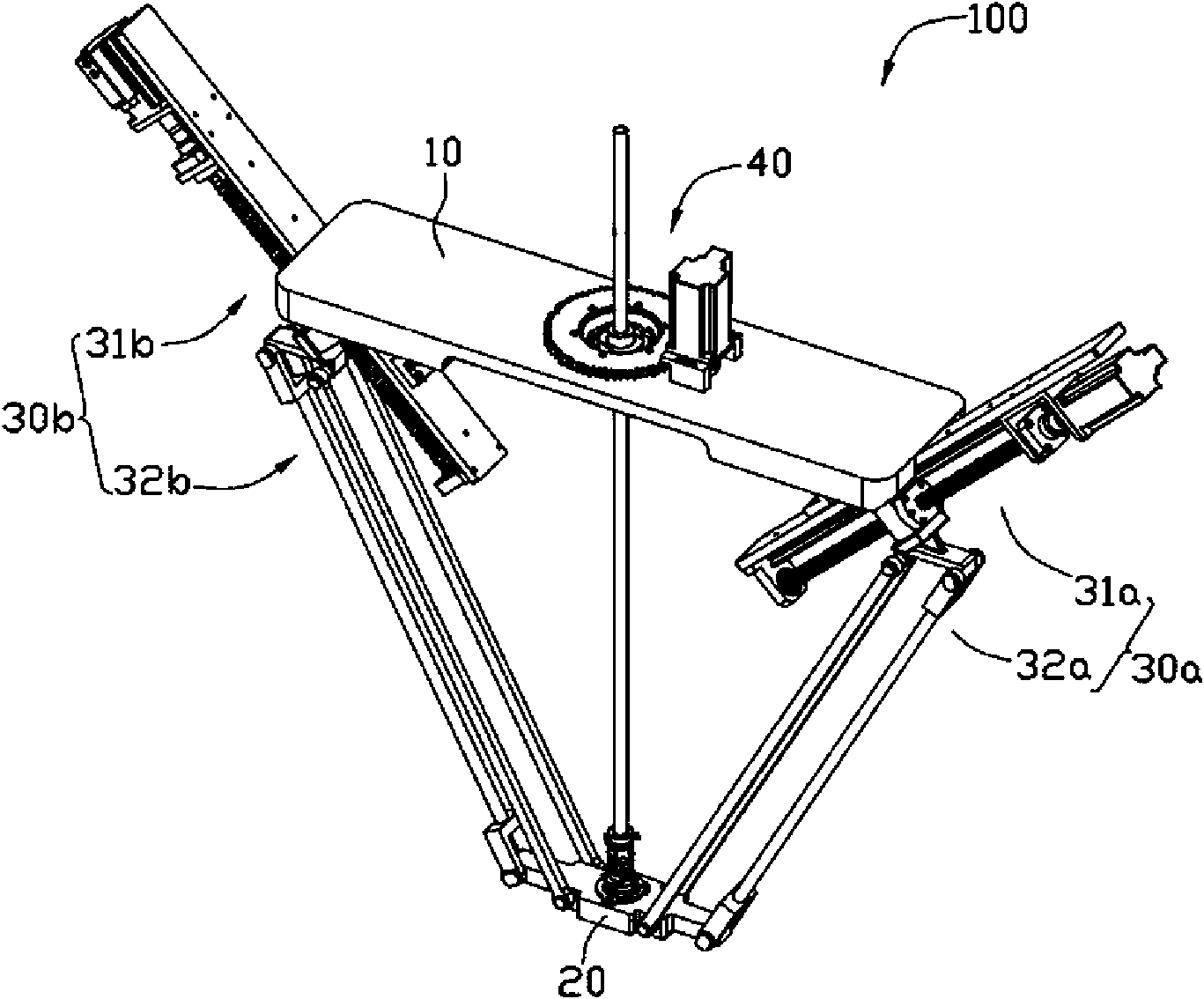
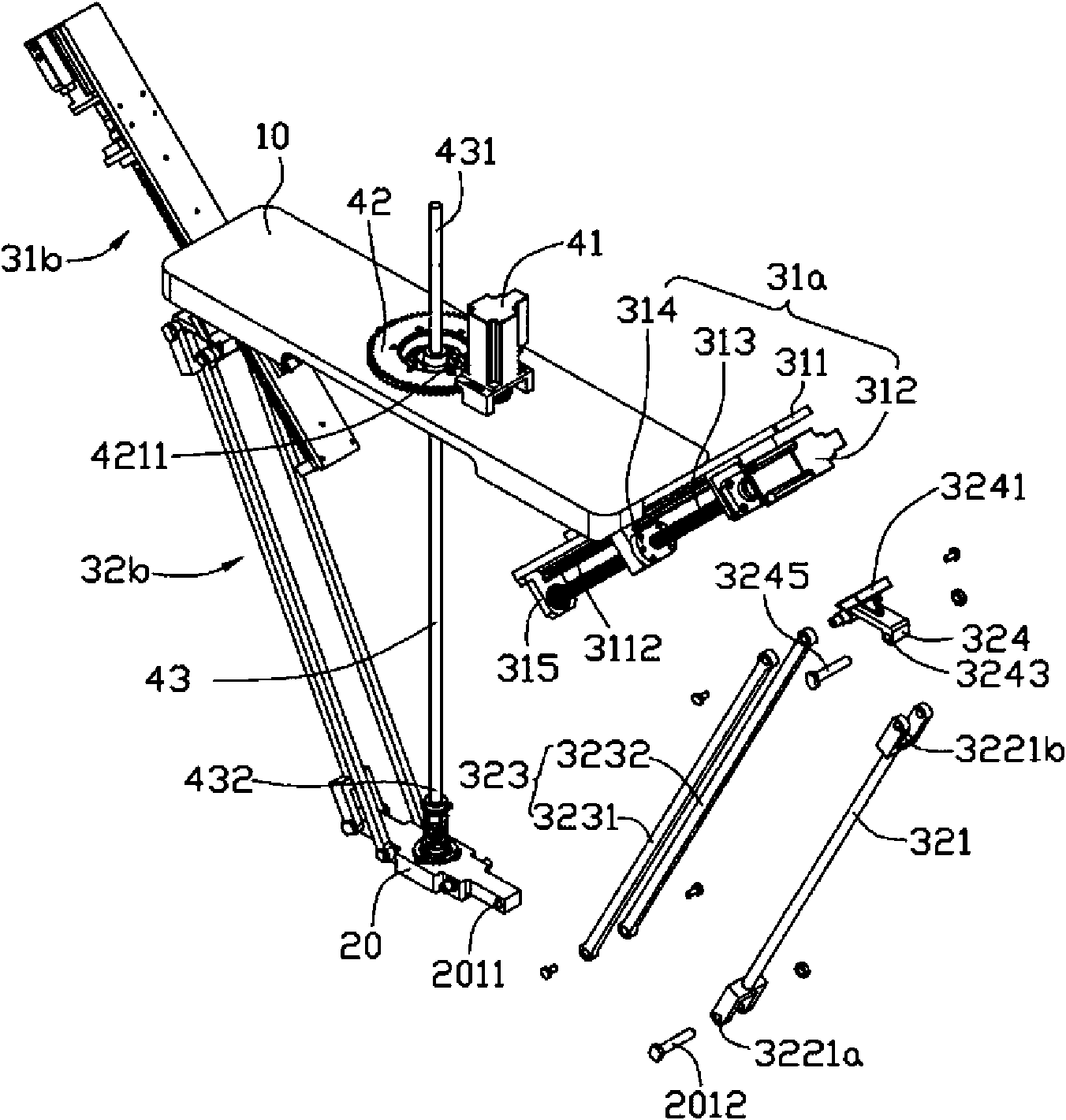
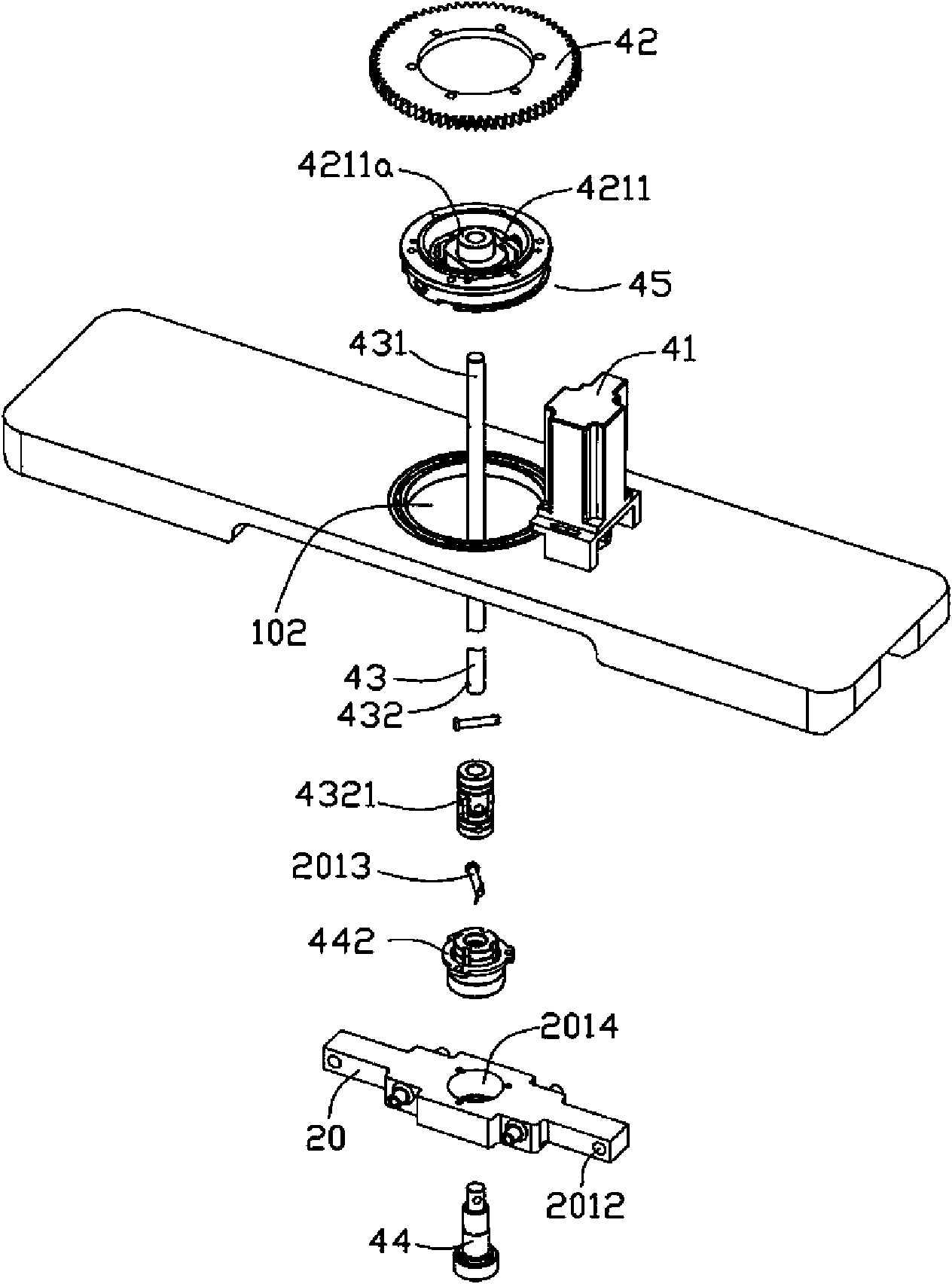
[0015] see figure 1 , the parallel robot 100 according to the embodiment of the present invention includes a frame 10 , a mobile platform 20 , two connecting branch structures 30 a, 30 b connected between the frame 10 and the mobile platform 20 , and a rotating branch structure 40 . The output end (not shown) of the rotating branch structure 40 is rotatably mounted on the mobile platform 20 , and end effectors such as clamps and suction cups can be mounted on the output end to perform corresponding tasks. The coordinated movement of the two connecting branch structures 30a and 30b can drive the mobile platform 20 to translate in a preset plane, and the rotating branch structure 40 can drive the end effector to rotate, so that the end effector can move in three degrees of freedom.
[0016] In this embodiment, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More