

Three-degree-of-freedom static load balance parallel motion simulation platform
A motion simulation, degree-of-freedom technology, applied in simulators, simulating devices of space navigation conditions, transportation and packaging, etc., can solve the problems of inability to balance the load weight, reduce the inertia of the mechanism, and low bearing capacity, and achieve easy installation. and maintenance, high dynamic response, large working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
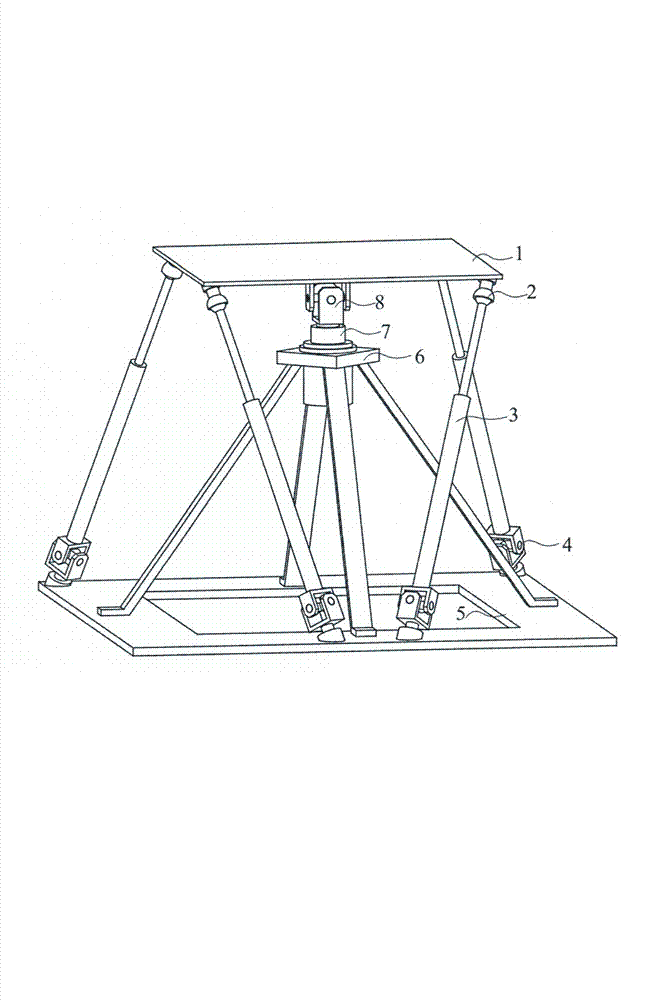
[0015] exist figure 1 In the schematic diagram of the structure of the three-degree-of-freedom static load balance parallel motion simulation table shown, the four UPS drive branches with the same structure are all composed of the first universal joint 4, the electric cylinder 3 and the ball joint 2, and the tail of the electric cylinder is connected to the The first universal joint is connected, and the telescopic rod of the electric cylinder is connected with the ball joint; the first universal joints of each driving branch are connected with the fixed platform 5, and the centers of the four first universal joints are in the shape of an isosceles trapezoid on the fixed platform Arrangement: The ball joints of each driving branch are connected with the moving platform 1, and the centers of the ball joints are arranged in a square on the moving platform. The middle bearing restraint branch of CU is located on the connection line between the center of the moving platform and th...
Embodiment 2
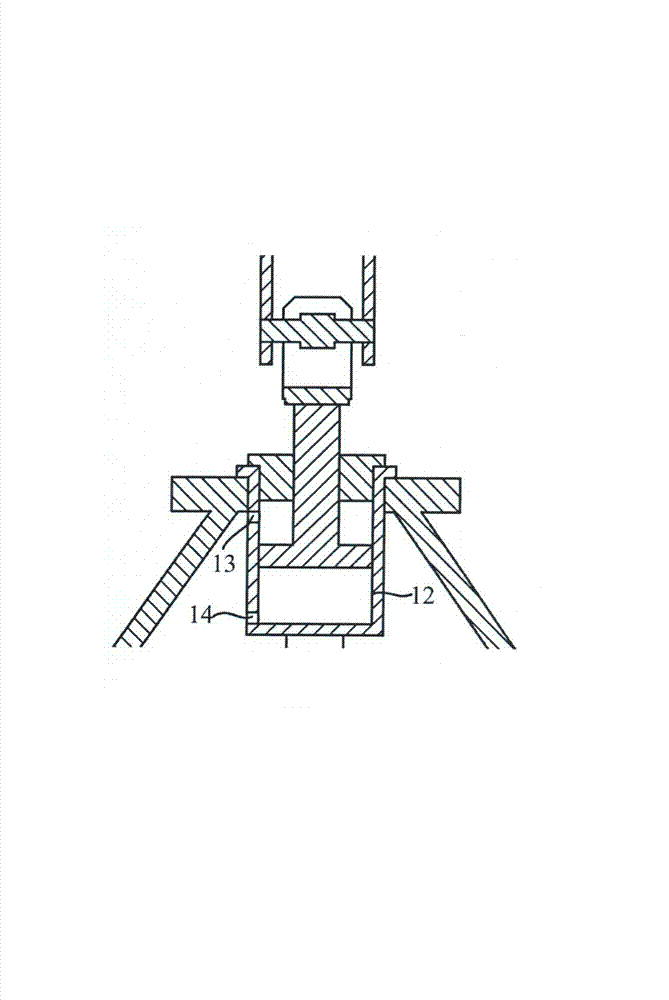
[0017] Such as image 3 As shown, the piston rod of the hydraulic cylinder or cylinder 12 bearing the constraint branch in the middle is connected with one end of the second universal joint, and an oil inlet or air inlet 14 is established at the bottom of the hydraulic cylinder or cylinder, and an oil inlet or air inlet 14 is established at the top of the hydraulic cylinder or cylinder An oil outlet or an air outlet 13 is established, and one end of the support frame is fixedly connected with the above-mentioned hydraulic cylinder or air cylinder, and four supporting legs of the support frame are fixedly connected with the fixed platform. Other components, mechanisms and connections are the same as those in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More