Method for taking out work
A workpiece and process technology, applied in the field of workpiece removal, can solve problems such as difficulty in matching holding postures, achieve smooth grip, smooth workpiece, and prevent hanging effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
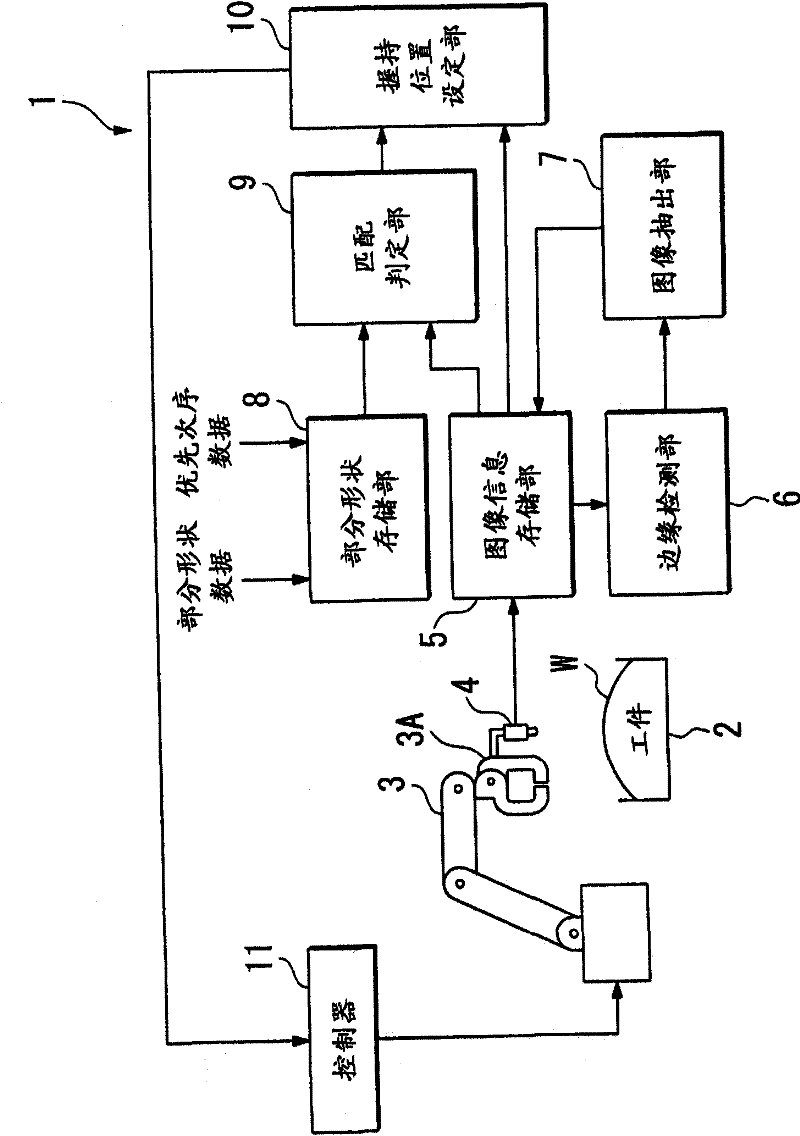
[0028] Embodiments of the present invention will be described below with reference to the drawings. figure 1 The workpiece take-out device 1 according to the embodiment of the present invention is shown. The workpiece take-out device 1 takes out the loose workpieces W in the hopper 2 one by one by the manipulator 3A of the robot 3 , and puts them into, for example, an automobile assembly line. Reference numeral 4 denotes a stereo camera. The stereo camera 4 is attached to the manipulator 3A of the robot 3 . In addition, the stereo camera 4 observes and acquires three-dimensional image information from the upper side of a plurality of works W of the same shape loaded on the hopper 2 .
[0029] The image information acquired by the stereo camera 4 is stored in the image information storage unit 5 . Here, the image information refers to the RGB value of each pixel as luminance information and the distance (mm, cm) of each pixel as distance information. In addition, instead of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More