

Device and method for realizing axle hole assembly by utilizing flexibility of robot
A robotic and flexible technology, used in manipulators, program-controlled manipulators, metal processing, etc., can solve the problems of low positioning accuracy of fixtures, assembly failures, and restrictions on popularization and application, to eliminate position uncertainty, reduce positioning accuracy and The effect of the requirement of robot operation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
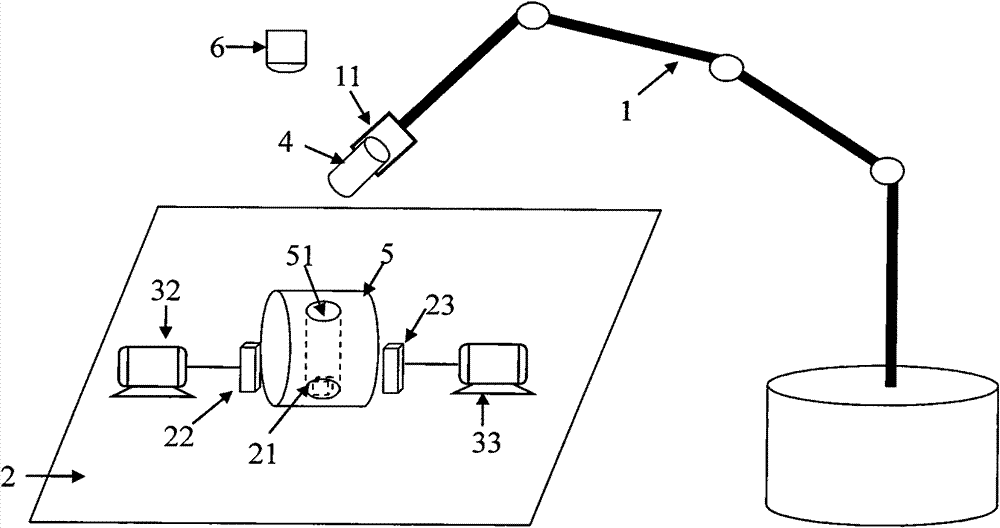
[0042] In order to make the purpose of the present invention, technical solutions and advantages clearer, now with the figure 1 The installation of the shaft 4 into the hole 51 on the cylindrical assembly body 5 shown in is a specific example, and the specific implementation manner of the present invention will be further described in detail.
[0043] Such as figure 1 As shown, at least two sets of clamping devices that can extend to the inside and retract to the outside are installed on the base 2, and the positioning bolt 21 is fixed on the position of the base 2 surrounded by all the clamping devices. Among all the clamping devices, The action points of at least one pair of clamping devices are on a straight line passing through and perpendicular to the center line of the positioning pin 21. Here, a pair of clamping devices satisfying this condition is defined as a pair of reference clamping devices, and the positioning pin 21 is defined as a pair of reference clamping devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More