

Robot Calibration Method and Calibration System
A calibration method and a calibration system technology are applied in the field of robot calibration system, which can solve the problems of inability to meet simple and fast calibration, large amount of calculation and high complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
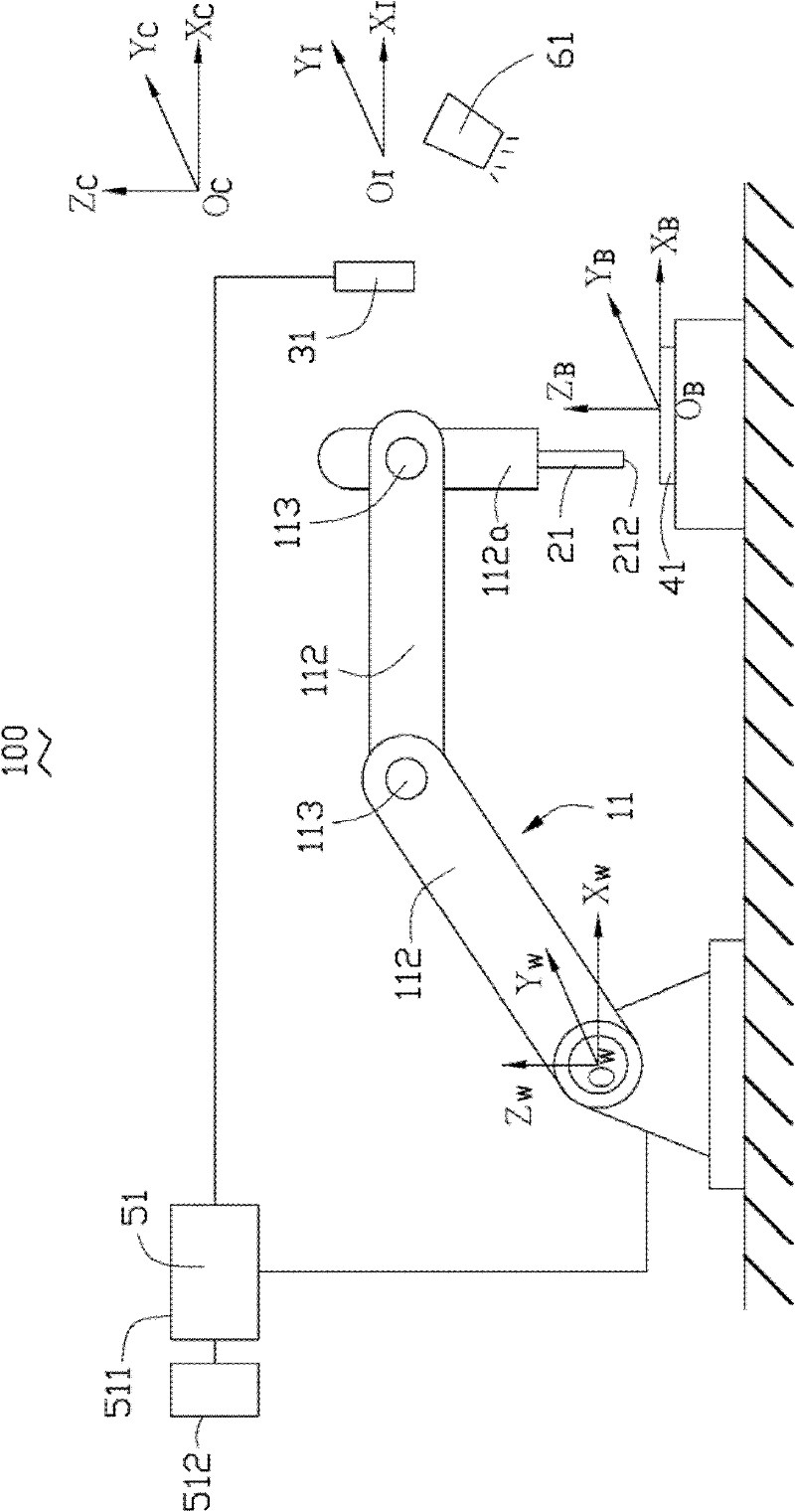
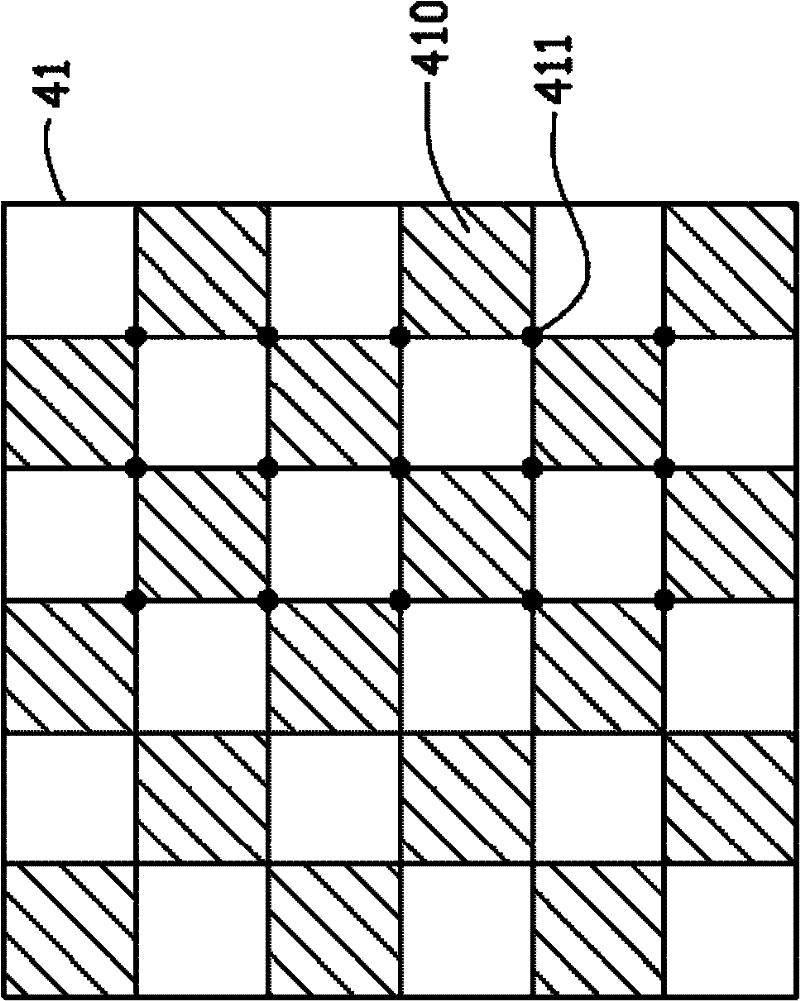
[0013] figure 1 Shown is a schematic diagram of the positional relationship of components used in the robot calibration system 100 according to the embodiment of the present invention. Such as figure 1 As shown, the robot calibration system 100 includes a robot body 11 , a calibration tool 21 driven by the robot body 11 , a camera 31 , a plane calibration plate 41 located in the field of view of the camera 31 , and a controller 51 .
[0014] The robot body 11 includes a plurality of mechanical arms 112 connected by joints 113 and driven by the corresponding joints 113 to move according to a preset trajectory. The joint 113 is installed with a displacement sensor, such as a rotary encoder, for sensing the rotation angle of the mechanical arm 112 .
[0015] The calibration tool 21 is fixedly installed on the mechanical arm 112 a at the end of the robot body 11 . The calibration tool 21 can be an elongated calibration rod with a contact 212 . Driven by the mechanical arm 112a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More