

Flexible adaptive under-actuated robot paw
A robot hand and self-adaptive technology, applied in the field of robot grippers, can solve the problems of unrealistic design and manufacture of universal robots, and achieve the effect of reducing requirements and uniform grasping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
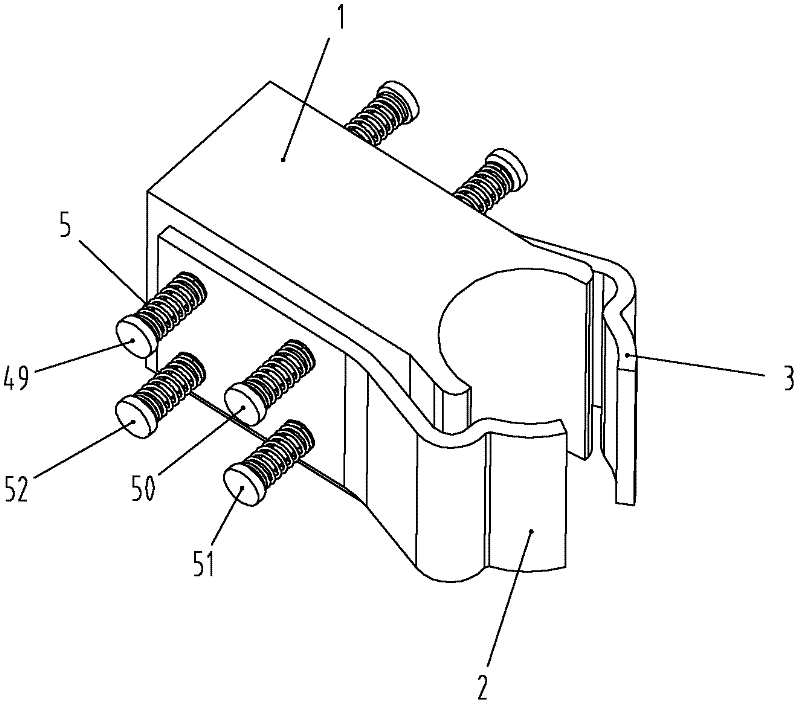
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings, but does not constitute any limitation to the present invention. Similar component numbers in the accompanying drawings represent similar components. As mentioned above, the present invention provides a flexible adaptive underactuated robot gripper, which can be installed on the end of the small arm of an industrial robot to grab workpieces. The flexible adaptive underactuated robot gripper of the present invention relies on the small arm The movement of the robot claws to complete the action of grabbing the workpiece, the claws can automatically adapt to the size of the workpiece, the opening and closing of its fingers are flexible, and generate stable and uniform grasping force, while reducing the requirements for the control system.
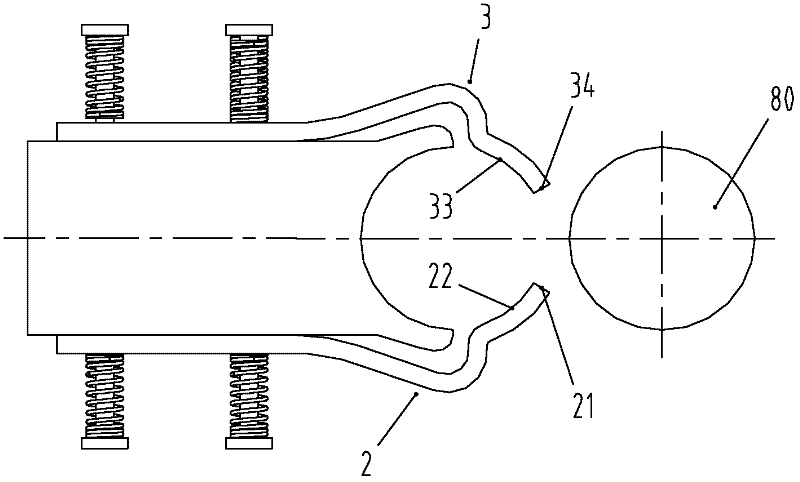
[0021] In this embodiment, taking the grasping of a cylindrical workpiece as an example, the working process and principle of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More