

Multi-UAV (unmanned aerial vehicle) dynamic formation control method
A control method and multi-UAV technology, applied in the field of flight control, can solve the problems of poor maintenance of formation rigidity and reduction of the update rate of formation wireless data links, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0083] The present invention will be further described in detail below in conjunction with the accompanying drawings.
[0084] A kind of dynamic formation control method of many UAVs proposed by the present invention comprises the following steps:
[0085] Step 1: Formation keeping method;
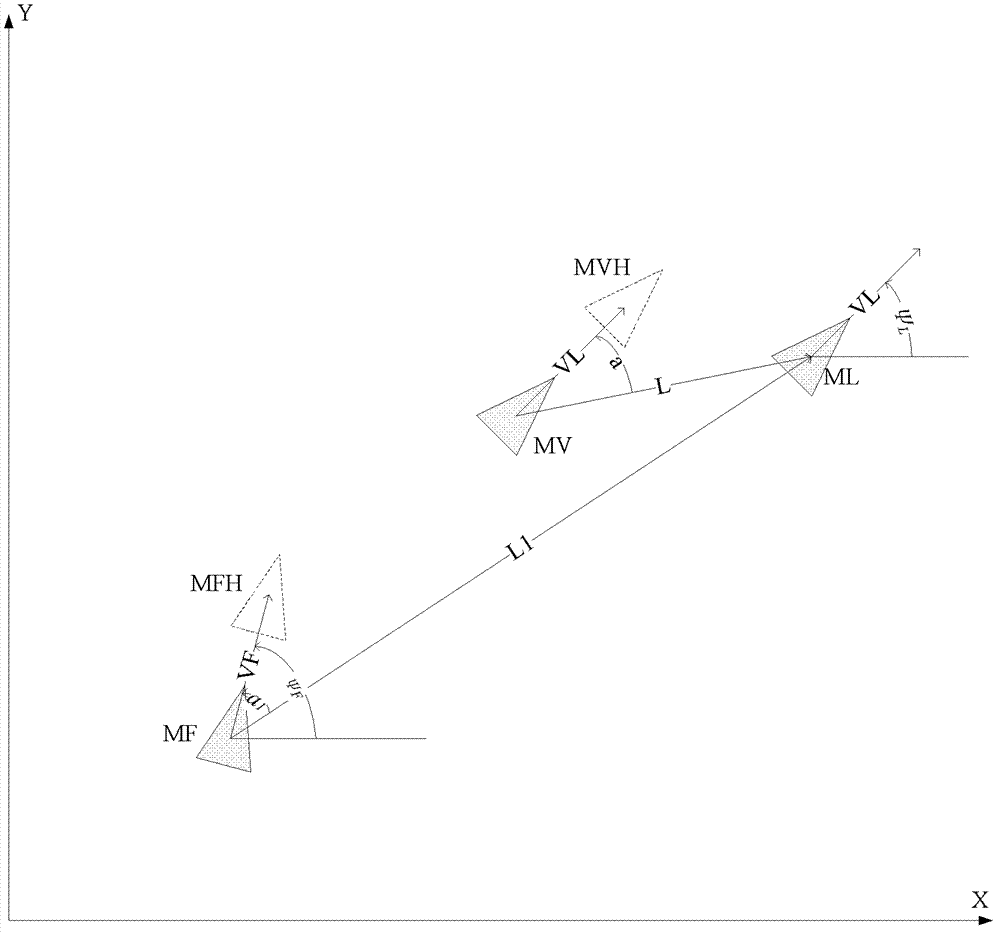
[0086] (1) Establish the ground coordinate system XOY;
[0087] Establish the ground coordinate system XOY, such as figure 1 , where the X-axis represents the easting position and the Y-axis represents the northing position. ML and MF represent formation leader and wingman respectively, Ψ L and Ψ F Represents the track deflection angles of the leader and wingman respectively, MV represents the wingman set by the virtual structure, referred to as the virtual wingman for short, L and a represent the expected distance and observation angle of the virtual wingman to the leader, respectively, L l and a l Represent the distance and observation angle of the actual wingman to the lead plane,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More