

Double-sided array push-broom three-dimensional mapping imaging method and imaging system
A technology of stereo surveying and imaging system, applied in the field of imaging system, which can solve the problems of reduced accuracy and low attitude measurement rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
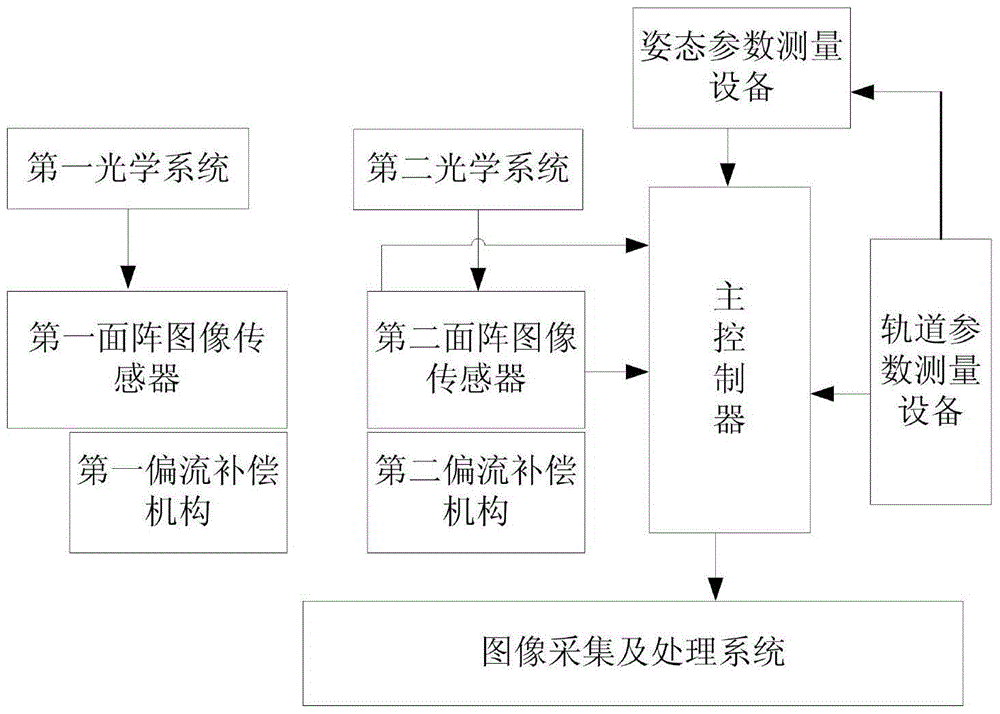
[0032] Specific implementation mode 1. Combination figure 1 Description of this embodiment, the double-sided array push-broom stereo surveying and mapping imaging system includes a main controller, a first optical system, a second optical system, a first area array CCD image sensor connected to the main controller, and a second area array CCD image sensor. Sensors, track parameter measurement equipment, attitude parameter measurement equipment, and image acquisition and processing systems,
[0033] The GPS receiver is used as a reference clock source in the orbital parameter measuring equipment to provide high-precision hardware second pulse signal and GPS whole second time corresponding to the second pulse for the main controller and the attitude parameter measuring equipment, so that each part is at the same time work together under the system. The attitude parameter measuring device provides attitude measurement parameter information for the main controller, and the orbit ...
specific Embodiment approach 2
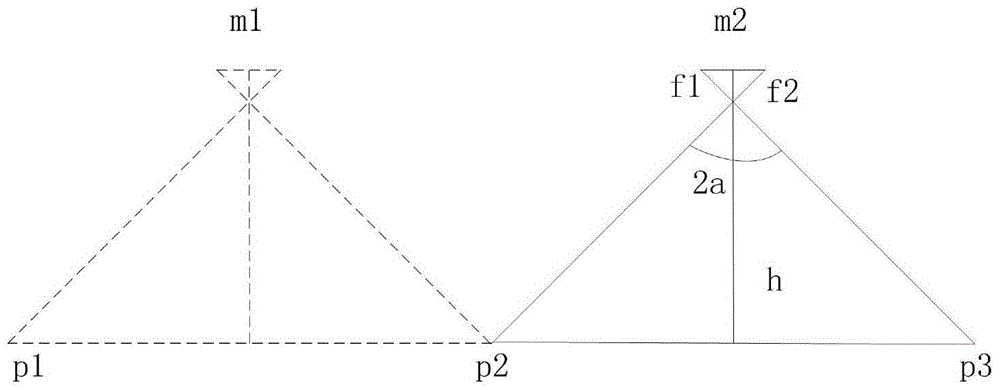
[0037] Specific embodiment two, combine figure 2 This embodiment is described. This embodiment is an imaging method based on the double-sided array push-broom stereo surveying and mapping imaging system described in Embodiment 1. This method is implemented by the following process:
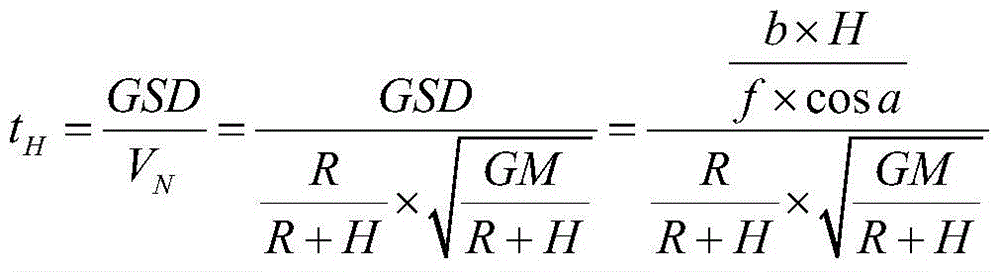
[0038] First, the average velocity Vg of the satellite is calculated according to the following formula:
[0039] V g = GM R + H
[0040]In the formula, G is the gravitational constant, M is the mass of the earth, R is the average radius of the earth, and H is the average altitude of the aircraft from the ground;
[0041] Calculate the average velocity V of the sub-satellite point N (ground speed):
[0042] V N = V g R R ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More