

Dirt recognizing system of cleaning robot and cleaning method
A cleaning robot and recognition system technology, which is applied in the cleaning robot dirt recognition system and cleaning field, can solve the problems of inaccurate correction of indications, failure to consider the influence of the gray scale of the light image, and the influence of the cleanliness of the attachments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and by taking an intelligent cleaning robot as an example.
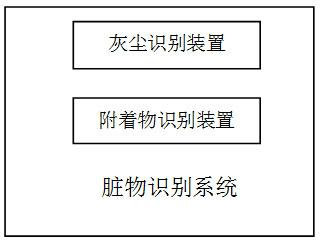
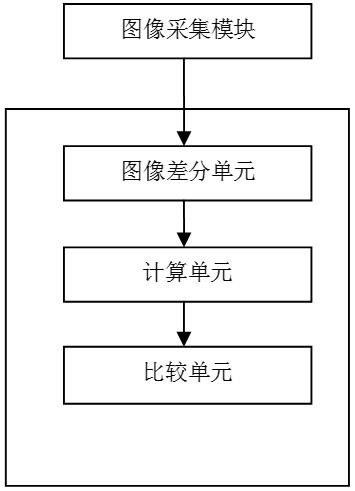
[0020] figure 1 A block diagram for the dirt recognition system, figure 2 A block diagram of the dust identification device, image 3 It is a block diagram of the attachment identification device. combine figure 1 , figure 2 , image 3 , The dirt recognition system of the present invention includes: a dust recognition device and an attachment recognition device.
[0021] On both sides of the dust channel of the cleaning robot, there are light-emitting elements and light-receiving elements respectively, which constitute a dust sensor for detecting the amount of dust entering the dust channel; LED surface light sources corresponding to the measured range are evenly distributed on the bottom of the cleaning robot, and the bottom There is a wide-angle CCD camera in the center. An...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More