

Master-slave hydraulic mechanical arm system of high-voltage hot-line operation robot
A robot main, high-voltage live technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult inspection and elimination of faults, poor operation flexibility, difficult control procedures, etc., to achieve convenient operation, reliable operation, stable and reliable performance. , The effect of flexible and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing and embodiment the utility model is described further.
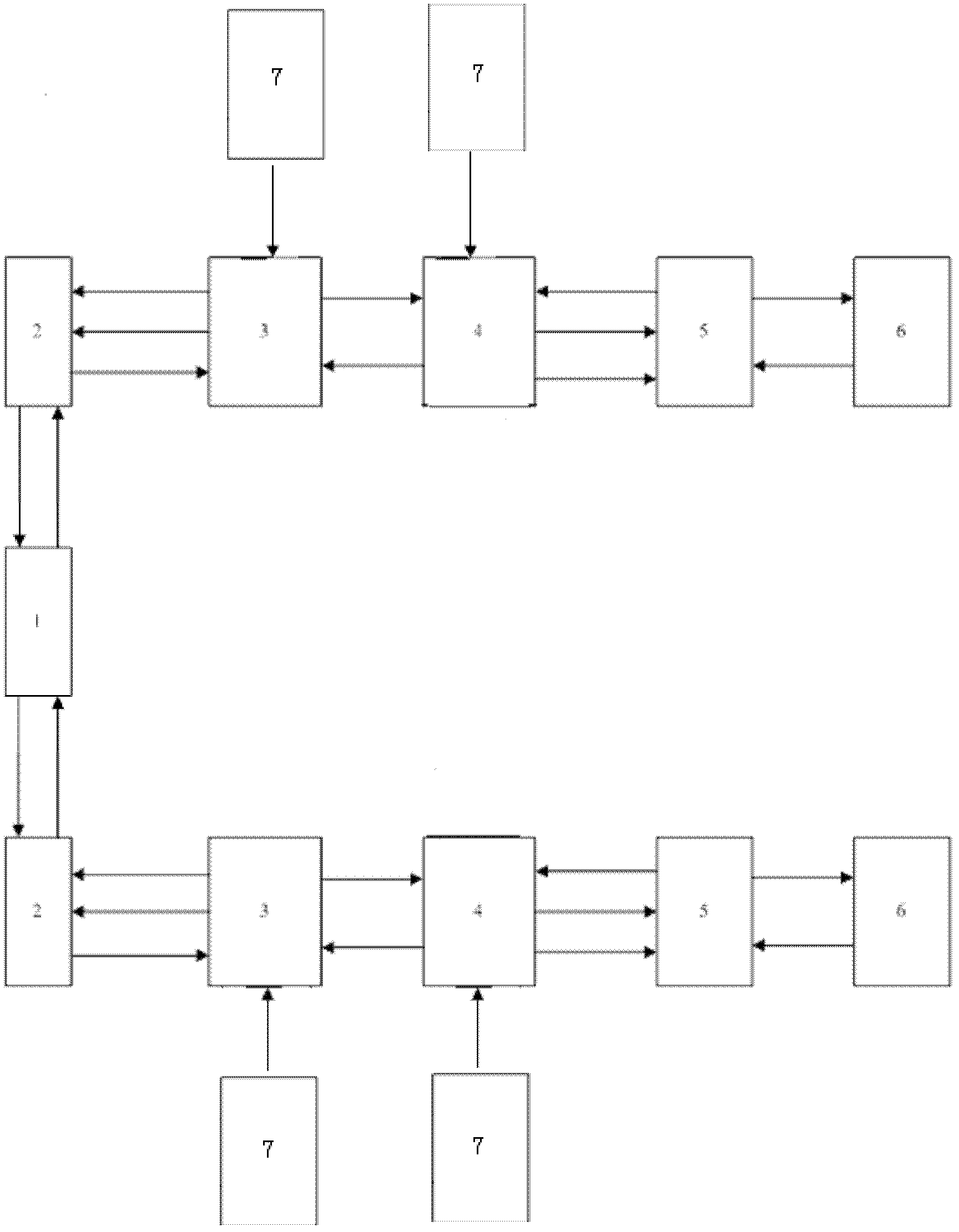
[0043] figure 1 Among them, a master-slave hydraulic manipulator system for a high-voltage live working robot, which includes a hydraulic oil source 1, a manipulator 2, a hydraulic servo driver 3, an optical fiber, a master hand controller 4, a master hand 5, a handheld terminal 6 and a power supply 7 The mechanical arm 2 is connected to the hydraulic servo driver 3 through the control bus, the power bus and the position signal bus, and is connected to the hydraulic oil source 1 through the oil return pipe and the oil inlet pipe; the hydraulic servo driver 3 communicates with the main hand controller 4 through an optical fiber; The main hand controller 4 is connected with the main hand 5 through the control bus, the power bus, and the state signal bus; the main hand 5 is connected with the handheld terminal 6 through the state signal bus and the command signal bus; C...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More