

System and method for synchronously controlling teleoperation
A technology of synchronous control and operating system, applied in general control system, control/adjustment system, two-dimensional position/channel control, etc. Operates on issues such as high robustness and strong real-time performance, achieving the effect of unifying real-time performance and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
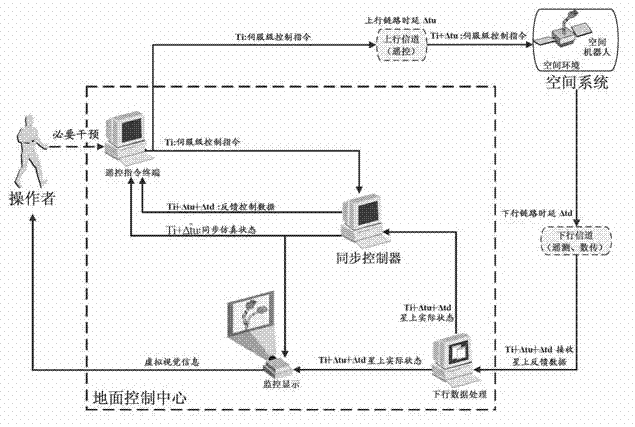
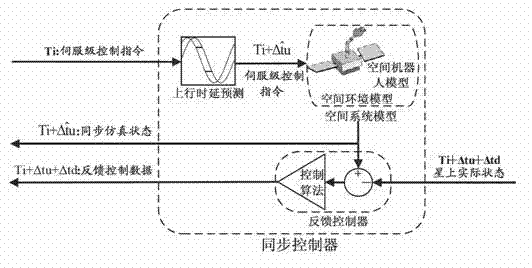
[0038] Such as figure 1 As shown, the synchronous control teleoperation system of the present invention includes an operator, a ground control center, a space system, and uplink and downlink channels. The operator is the actual operator, who supervises the remote operation process online; when the actual state of the space system deviates greatly from the expected state, or the system state has a large risk, or other operation errors occur, the operator commands the terminal and the uplink channel through the remote control. Send the operation suspension command to the space system, so as to implement the necessary online intervention in the teleoperation process. The ground control center constructs an equivalent model of the space system on the ground and predicts the uplink time delay in real time, thereby realizing the sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More