

Binocular visual sense based intelligent obstacle avoidance algorithm
A technology of intelligent obstacle avoidance and binocular vision, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of unknown robot operating environment, lack of dynamic prediction, missing information, etc., and achieve high-precision and correct detection of obstacles, The effect of good obstacle avoidance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
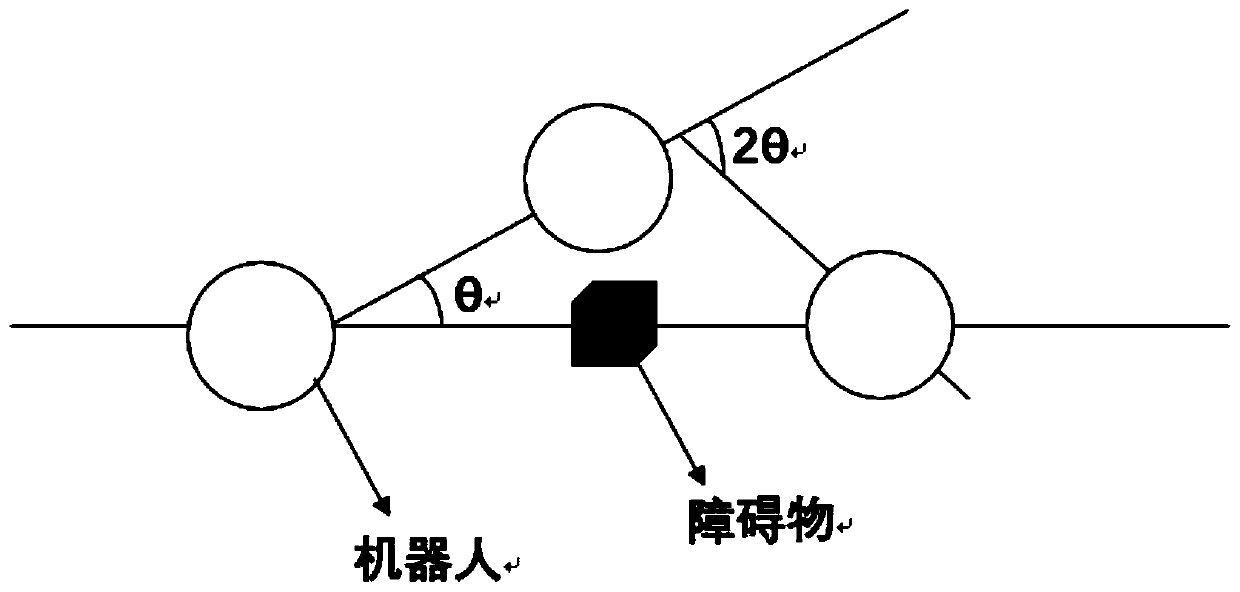
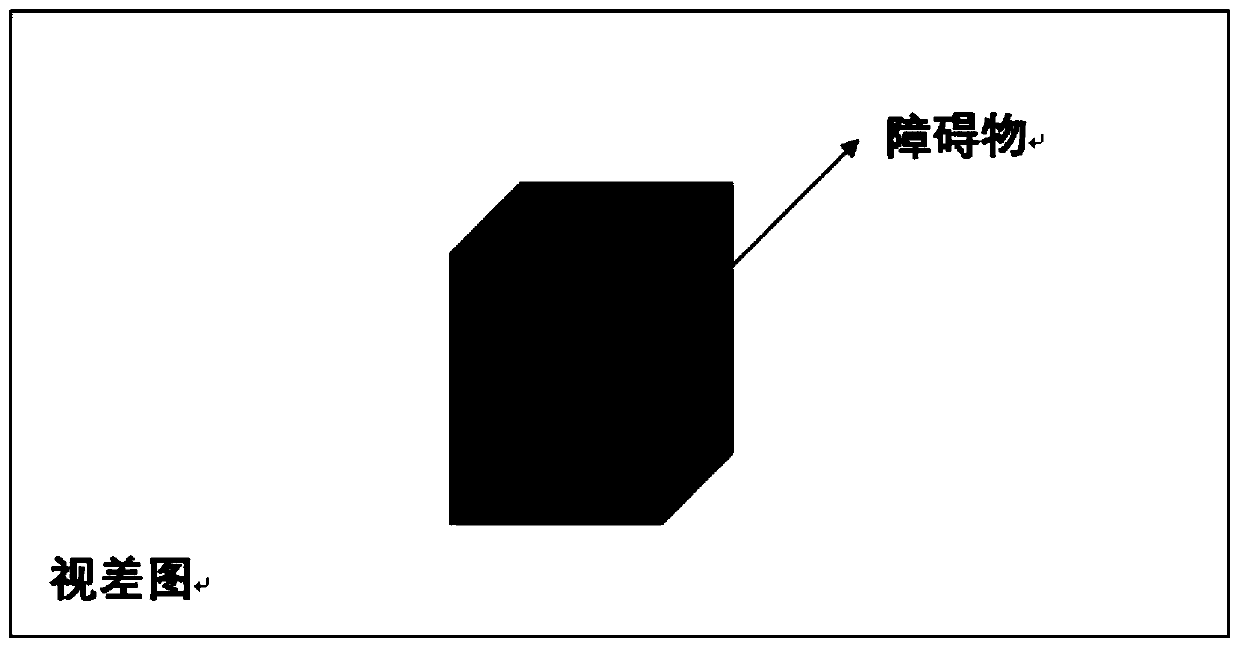
[0038] When the robot of the present invention detects an object in front and determines it to be an obstacle, it immediately stands and stops, obtains the size parameters and orientation information of the obstacle in a static state, and controls the robot to bypass the obstacle according to the obstacle size parameters and orientation information, Specifically:
[0039] Such as Figure 1~2 As shown, an intelligent obstacle avoidance algorithm based on binocular vision includes the following steps:
[0040] Step 1: Plan the path according to the destination to be reached by the robot, and calibrate the left and right cameras of the binocular camera respectively;
[0041] Step 2, collect the image in front of the robot through the binocular camera, the collection perio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More