

Control method for force feedback of electro-hydraulic servo remote control manipulator of multiple degrees of freedom
A control method, electro-hydraulic servo technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve unsatisfactory, inability to better grasp the interference and displacement of the driven side, and inability to accurately perceive the interference force of the driven side Displacement and other issues, to achieve a good effect of versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
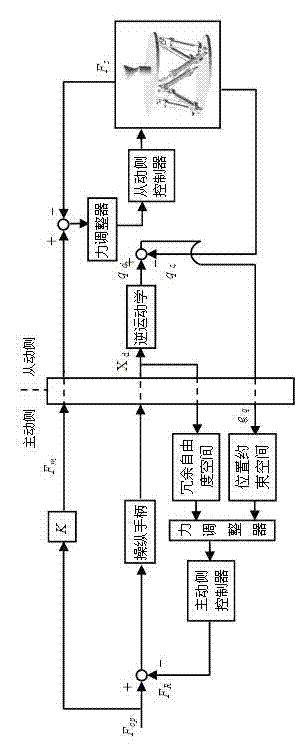
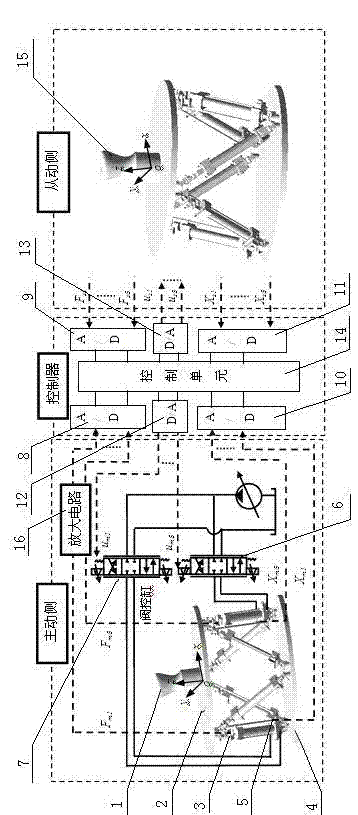
[0033] see figure 1 and figure 2 As shown, in the multi-degree-of-freedom electro-hydraulic servo telecontrol manipulator force feedback control method of the present invention, the joystick 1 on the active side does not follow the interaction between force and position on the driven side, but provides the operator with exactly the same constrained equipment. When any degree of freedom of the driven side interferes with an obstacle, the same position space as that of the driven side can be formed on the control handle of the driving side, so that the operator can perceive the magnitude and direction of the interference force on the driven side and the degree of freedom of the interference . Because any degree of freedom of the slave-side manipulator may interfere with environmental obstacles, the feedback for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More