

Multi-view three-dimensional data registration method based on spatial line recognition and matching
A three-dimensional data, multi-view technology, applied in the field of multi-view three-dimensional data splicing, can solve problems such as time-consuming, inability to achieve alignment, cumbersome measurement process, etc., to prevent convergence errors and reduce the amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
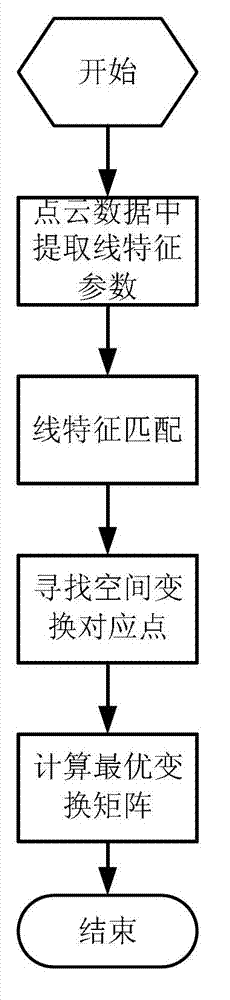
[0059] Specific implementation method: as follows figure 1 The shown method steps describe a concrete implementation.
[0060] The present invention is a multi-view three-dimensional data splicing method based on spatial straight line recognition and matching. The specific steps of the method are:
[0061] Step 1: Extract straight line feature parameters from the original point cloud data: first find the point cloud that belongs to the line feature according to the curvature of the point cloud data, assuming that the point cloud set can be used P{(x 1 ,y 1 ,z 1 )...(x n ,y n ,z n )}express, is the mean value of the coordinates, and the matrix can be constructed from the mean value Then the covariance matrix of P:
[0062] X=[P-N] T ·[P-N]
[0063] According to the characteristics of eigenvalues and eigenvectors, we can know that:
[0064] X·α=λ·α, let λ 1 ,λ 2 ,λ 3 is the eigenvalue of X, and the size relationship has λ 1 2 3 , then the estimated curvature i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More