

Multiple-sensor united calibration method
A joint calibration and multi-sensor technology, applied in the field of sensor calibration, can solve the problems of unable to measure the edge position and accurately reflect the position of the end face, etc., and achieve the effect of solving registration problems and expanding the range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0038] In order to realize the measurement and positioning of microstructures, expand the scope of practical applications, and meet the needs of practical applications, the embodiment of the present invention proposes a multi-sensor joint calibration method, which is described below for details:
[0039] 101: Calibrate camera parameters by using a round hole target;
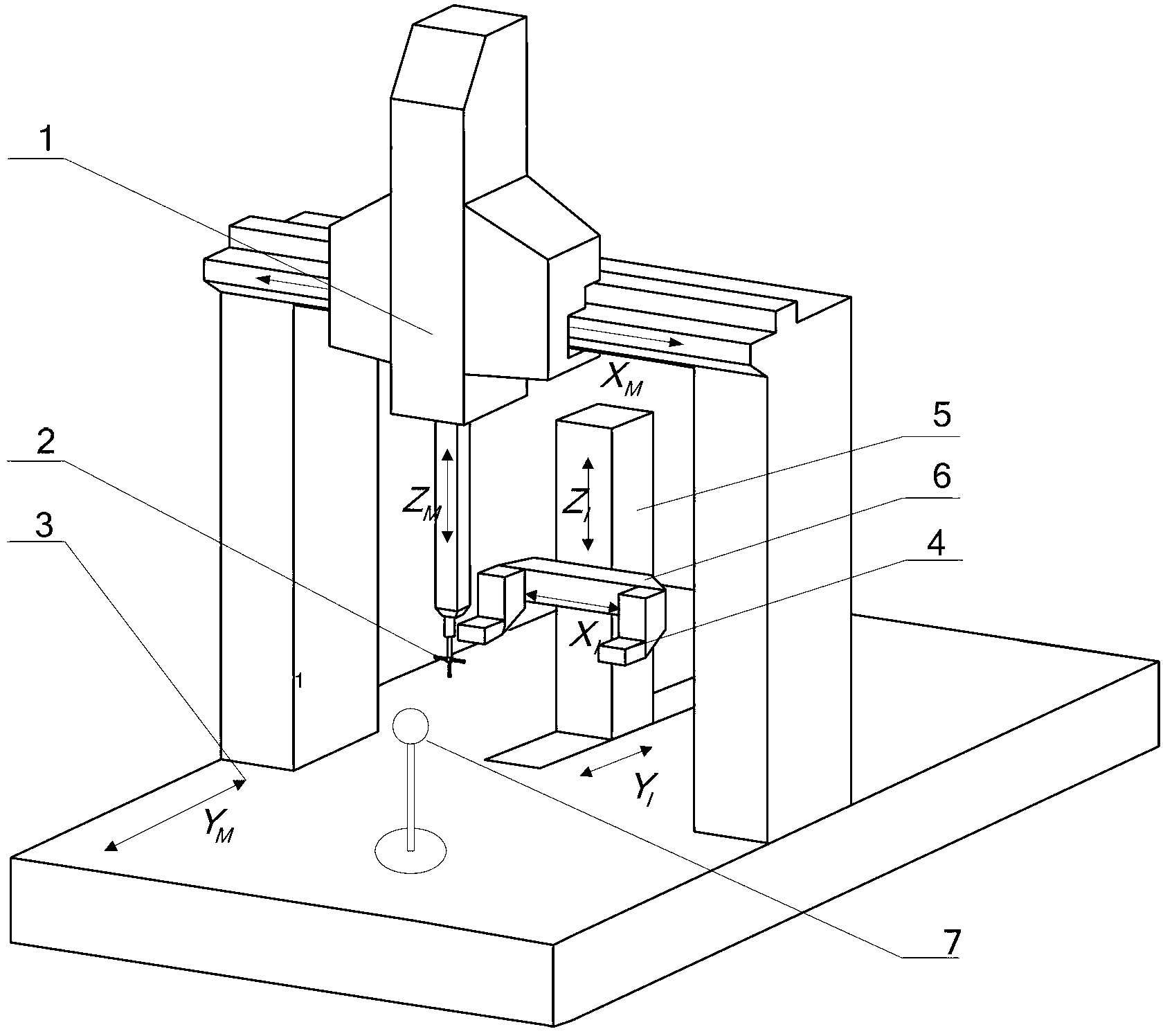
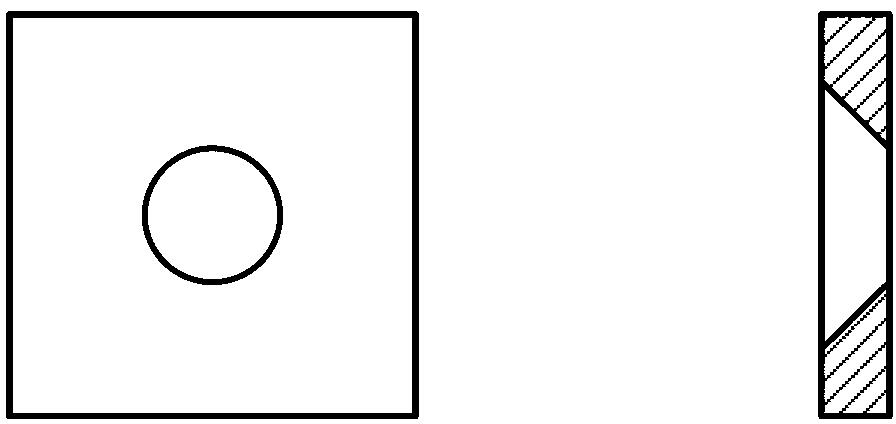
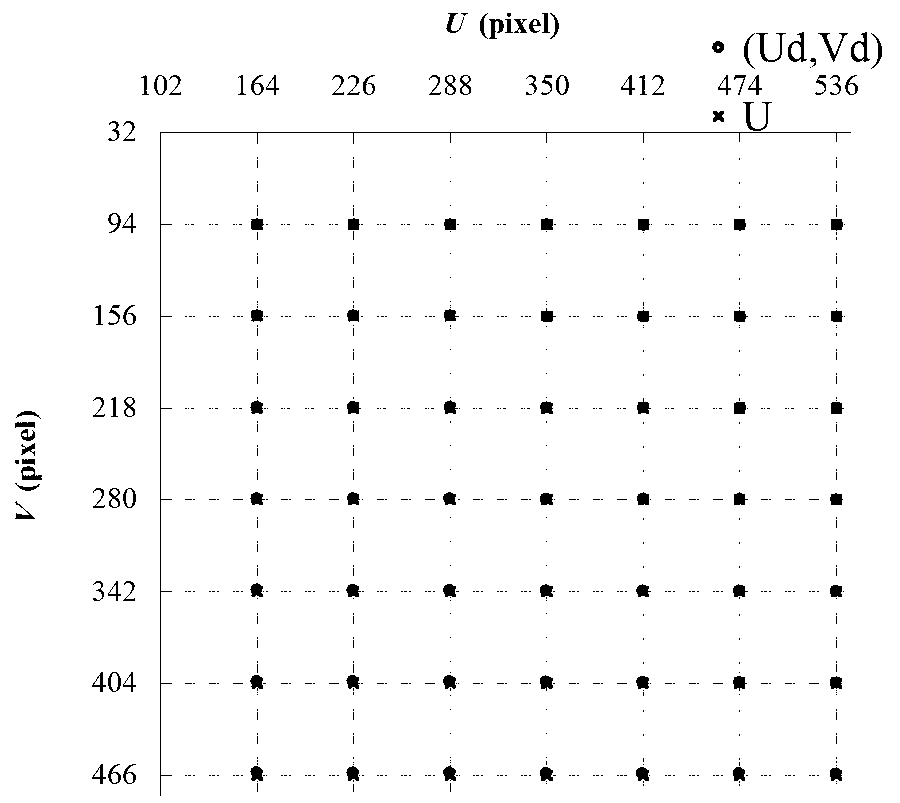
[0040] 1) The round hole target is fixed, the camera is fixed on the motion mechanism and moves along the Y I Xiang and Z I Make a two-dimensional translational movement, take the center of the circular hole target as a feature point, and record the coordinates of the motion mechanism and the image plane coordinates of the feature point at each position;
[0041] see f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More