

Image/inertial navigation integrated navigation method based on information credibility
A technology of integrated navigation and reliability, applied in the field of image/inertial navigation integrated navigation based on information reliability, which can solve the problems of deviation of results, loss of meaning, and mismatching.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
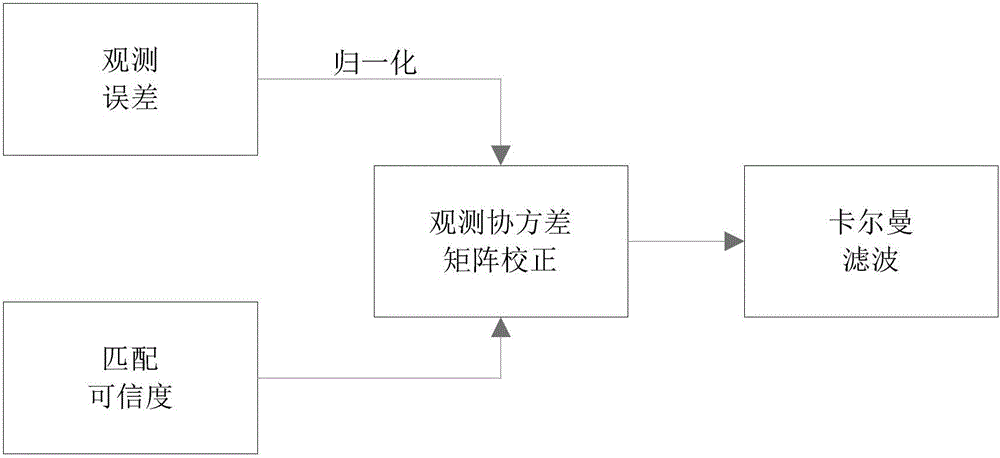
[0026] Such as figure 1 As shown, the image / inertial navigation integrated navigation method based on information credibility of the present invention, its specific process is:
[0027] 1. Normalization of position error: take the difference between the positions output by the image matching aided navigation system and the inertial navigation system as the observed quantity, and normalize its value to a range of 0 to 1 according to the error range of the observed quantity, and the value is z normalized .
[0028] Define the reference map loaded by the image-assisted navigation system to correspond to the north and east directions with a size of x range ×y range , the coordinates corresponding to the image matching position and the inertial navigation position on the image are (x img ,y img ), (x ins ,y ins ). The observations...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More