

Humanoid robot gait planning and synthesizing method
A humanoid robot and gait planning technology, applied in two-dimensional position/channel control, etc., can solve problems such as robot walking instability, gait cycle stability impact, collision, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] In order to more clearly illustrate the purpose and technical solutions of the present invention, the implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
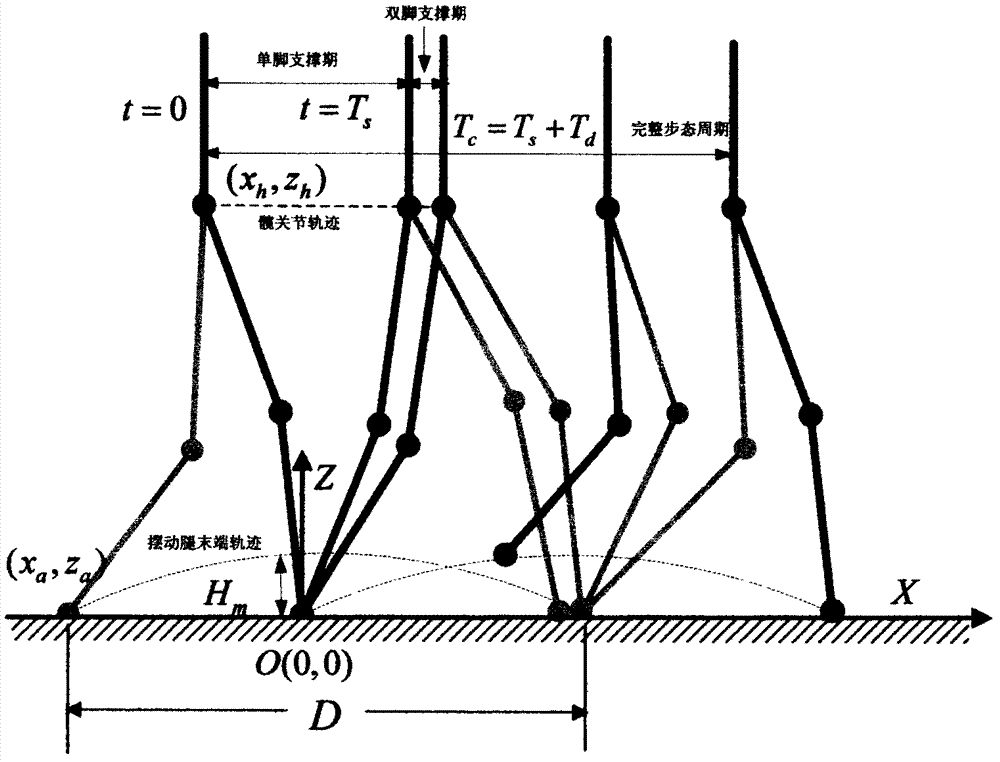
[0073] In order to obtain the trajectory of the end of the swinging leg, it is necessary to determine the coefficients in formula (1) and determine the coefficients in formula (1) according to the constraints in the process of robot walking.
[0074] First give the known parameters, D=0.72m, T s =0.6s, T d =0.1s, T c =T s +T d =0.7s, T m = 0.3s, H m = 0.05m, H h = 1.2m, S m = 0m, S s0 = 0.18m, S d0 = 0.12m, V h1 = 0.42m / s, V h2 = 0.39m / s.
[0075] 1. Solve the swing leg trajectory function
[0076] Rewrite the swing leg trajectory function as the following:
[0077] X a = x a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More