

Biped robot kinematic analysis method based on toddler gait extraction
A technology of robot kinematics and analysis methods, applied in the field of computer vision and biometric recognition, can solve the problems of insufficient gracefulness of bipedal gait stability, and specific elaboration of the application of bipedal robot gait planning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
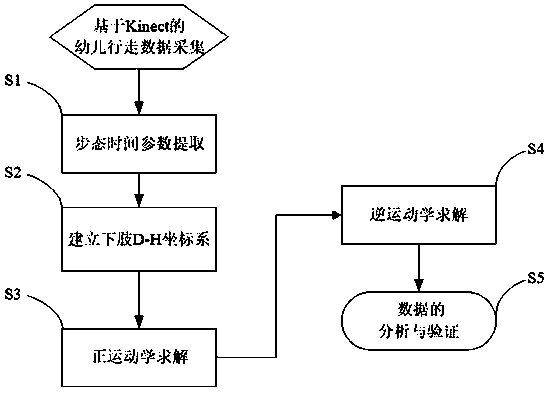
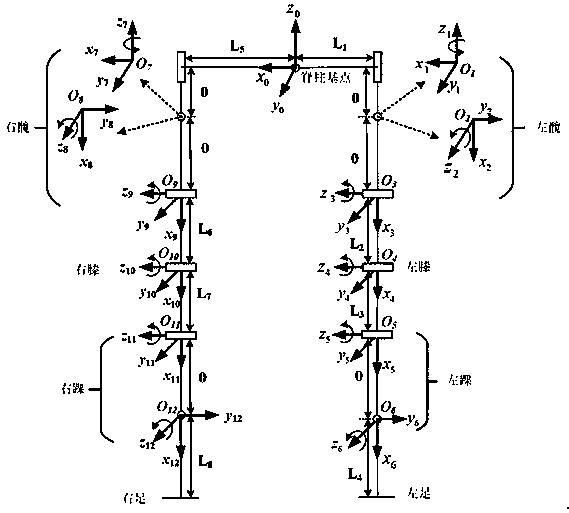
[0023] The invention aims to use the Kinect sensor to quickly obtain walking data of children in different periods. On the basis of extracting gait space-time parameters, in order to apply the gait law of toddler children to biped robots, the D-H method is used to normalize the lower limbs of the human body. Kinematics and inverse kinematics are solved to obtain the change of each joint angle, which lays the foundation for the motion planning of the lower limbs of the biped robot.
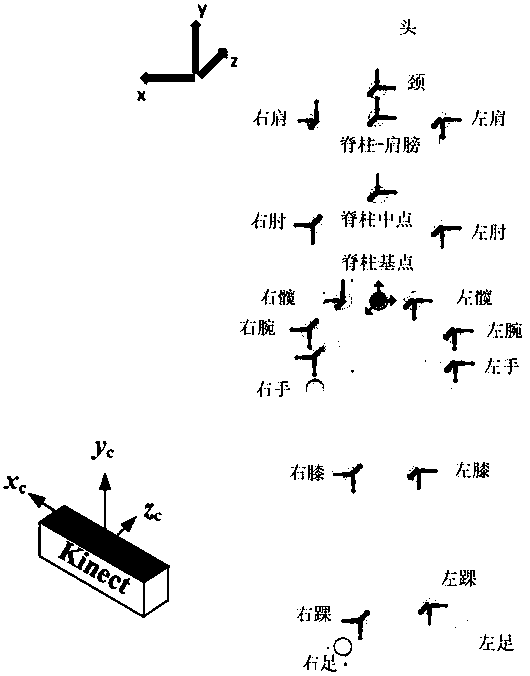
[0024] The present invention extracts the walking gait of the toddler based on the Kinect sensor. The equipment used includes Kinect2.0, a tripod and a computer. In front, collect video data of children walking towards Kinect within the range of 1.6-3.8m. Starting from the age of the month when the child can walk independently for a distance of more than 2m, it will be used as an effective sampling record for later data processing.
[0025] By observing the sampling video of Kinect, it is found th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More