

Humanoid robot walking control method
A technology of humanoid robot and control method, which is applied in the field of walking control of humanoid robot, and can solve problems such as ignoring the structural characteristics of the cerebellum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
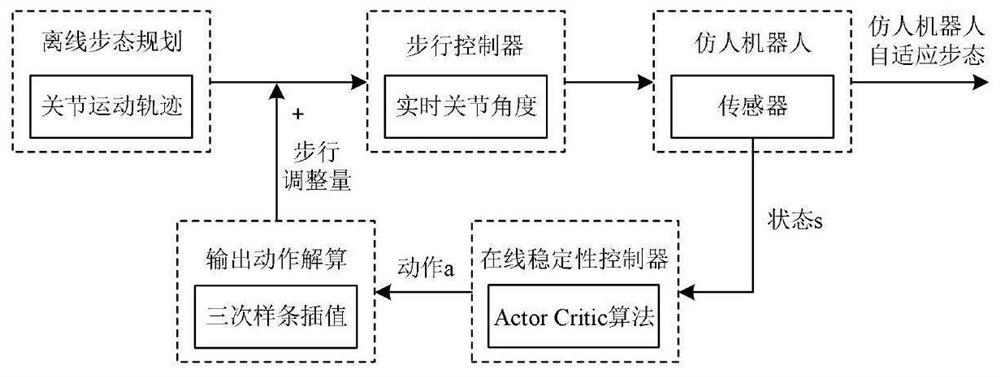
[0104]This embodiment discloses an online walking stability control method for a humanoid robot based on the Actor Critic reinforcement learning algorithm. The present invention is based on the research idea of the walking control strategy of offline gait planning combined with online stability adjustment, and designs the framework structure of the walking control strategy like figure 1 As shown, the method mainly includes two steps: 1. Generate offline gait based on ZMP theory and cubic spline interpolation method, that is, the offline gait planning of the humanoid robot, so that the humanoid robot can track the joint motion trajectory generated offline, Possess basic walking ability. 2. Design an online stability controller based on the AC reinforcement learning algorithm. The controller can collect the state information of the robot in real time during the walking process of the robot, and adjust the walking posture of the robot so that it can walk stably on uneven road c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More