[0008] In order for the
mobile station to obtain the coordinates of the
ginseng coordinate system, there are three conventional methods: 1) The
mobile station submits the measured WGS84 coordinates in written form to the surveying and mapping results storage unit approved by the State Bureau of Surveying and Mapping. Coordinate conversion after the event, and the result will be sent back to the
mobile station. This mode has good
confidentiality, and the accuracy and reliability of the results are guaranteed, but the procedure is cumbersome, the work efficiency is low, and it is not real-time, which cannot meet the needs of real-time stakeout
ginseng coordinate system coordinates
2) The surveying and mapping results storage unit approved by the State Bureau of Surveying and Mapping establishes a coordinate conversion
network service system [2] [3], authorized mobile stations can submit the measured WGS84 coordinates online through the network, and the
service system completes the coordinate conversion online and sends the results through the network Feedback to the mobile station. The
advantage of this mode is that the mobile station is easy to use and the results are standardized, but it can only be carried out after the measurement is completed, and it cannot meet the needs of real-time stakeout ginseng coordinate system coordinates
3) The mobile station obtains parameters by itself through the joint measurement of known points. There must be known point distribution near the survey area, the field
workload is heavy, the
data processing is relatively complicated, the quality requirements of the mobile station are high, the operation efficiency is low, and the accuracy of the results is low. and reliability are not guaranteed
[0009] In order to enable the RTK rover to obtain the coordinates of the ginseng coordinate system in real time, some scholars have proposed several solutions, which can be roughly divided into five types: 1) Store the conversion parameters in the form of
software modules in the measuring device of the rover (PDA ) in [4], the biggest
disadvantage of this method is that it cannot ensure that the parameters are not leaked, and different brands or models of equipment need to develop modules separately, which not only involves massive conversion parameters between different coordinate systems in various places, but also involves different production It is very difficult for manufacturers to develop, actually use and promote
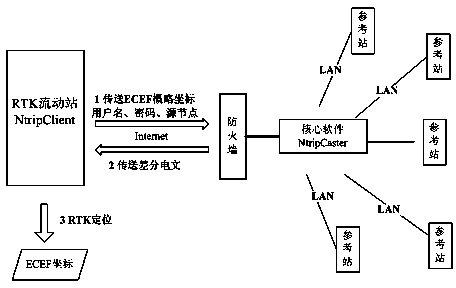
2) Send the seven confidential parameters to the rover via a differential message [5], and the equipment of the rover obtains the coordinate conversion parameters from the differential message. At present, only a few differential messages (such as RTCM3.1) and the latest equipment of a very small number of brands support this This mode, because the encoding method of the differential message is open, anyone can obtain it through decoding, so its
confidentiality is almost zero, especially not applicable in China
3) Convert the coordinates of the reference station in the differential message to the coordinates of the ginseng coordinate system and then send it to the rover[6], because the difference between the
ECEF coordinates and the coordinates of the ginseng coordinate system at the same point may reach about 100m or even greater, The coordinates of the reference station are the coordinates of the starting point of the rover for baseline calculation. Usually, the coordinates of the starting point with an error of more than 30m will cause a large baseline
calculation error, and the longer the baseline, the greater the
impact; at the same time, this mode ignores the point with the same name The difference between the baseline in the WGS84 coordinate system and the ginseng coordinate system is that the reference station (virtual or actual) is far away from the rover (for example, in the single reference station mode, the rover and the reference station can tens of kilometers away), or when the values of the rotation angle and
zoom ratio in the seven parameters are large, and when these two factors exist at the same time, ignoring this difference may cause a huge error
The invention application did not provide theory and formula derivation, neither the pseudo-datum nor the cube gave a clear determination method, nor did it explain how to ensure that the pseudo-datum would remain consistent with the specific datum after projection; in fact, there are usually many kinds of datums (such as Beijing 54 , Xi’an 80, etc.), the rover may need different datums in different projects, and the
algorithm can only target a certain kind of datum, which will make the
algorithm unable to cope with the situation where there are multiple datums in the same area; according to VRS difference It is also imprecise to use the reference station coordinates in the message to determine the approximate position of the mobile station
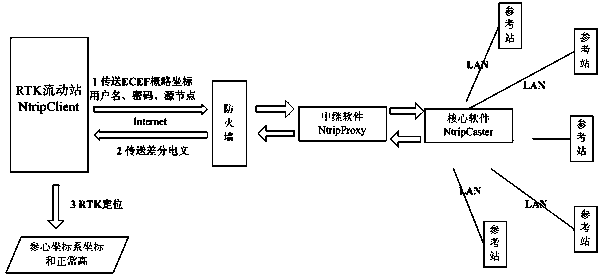
5) Zhang Li and others discussed the security mode of adding an intermediate
server and "another coordinate system" [8], but did not give specific calculation formulas for the conversion parameters from "another coordinate system" to the local coordinate system, and stayed at The discussion level of the model, and did not discuss the rules that "another coordinate system" should follow, ignoring the influence of "another coordinate system" on the positioning results of the rover
Schemes 3) to 5) have one thing in common besides their respective shortcomings: none of them proposed a solution for real-time measurement of normal height by RTK



 Login to View More
Login to View More  Login to View More
Login to View More