

Self-adaptive butt-joint automatic charger
An automatic charging device and self-adaptive technology, applied in the direction of circuit devices, battery circuit devices, connecting device components, etc., can solve the problems that mobile robots cannot be automatically charged, cannot be accurately controlled, and have high cost, and achieve simple structure and accurate control , the effect of low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
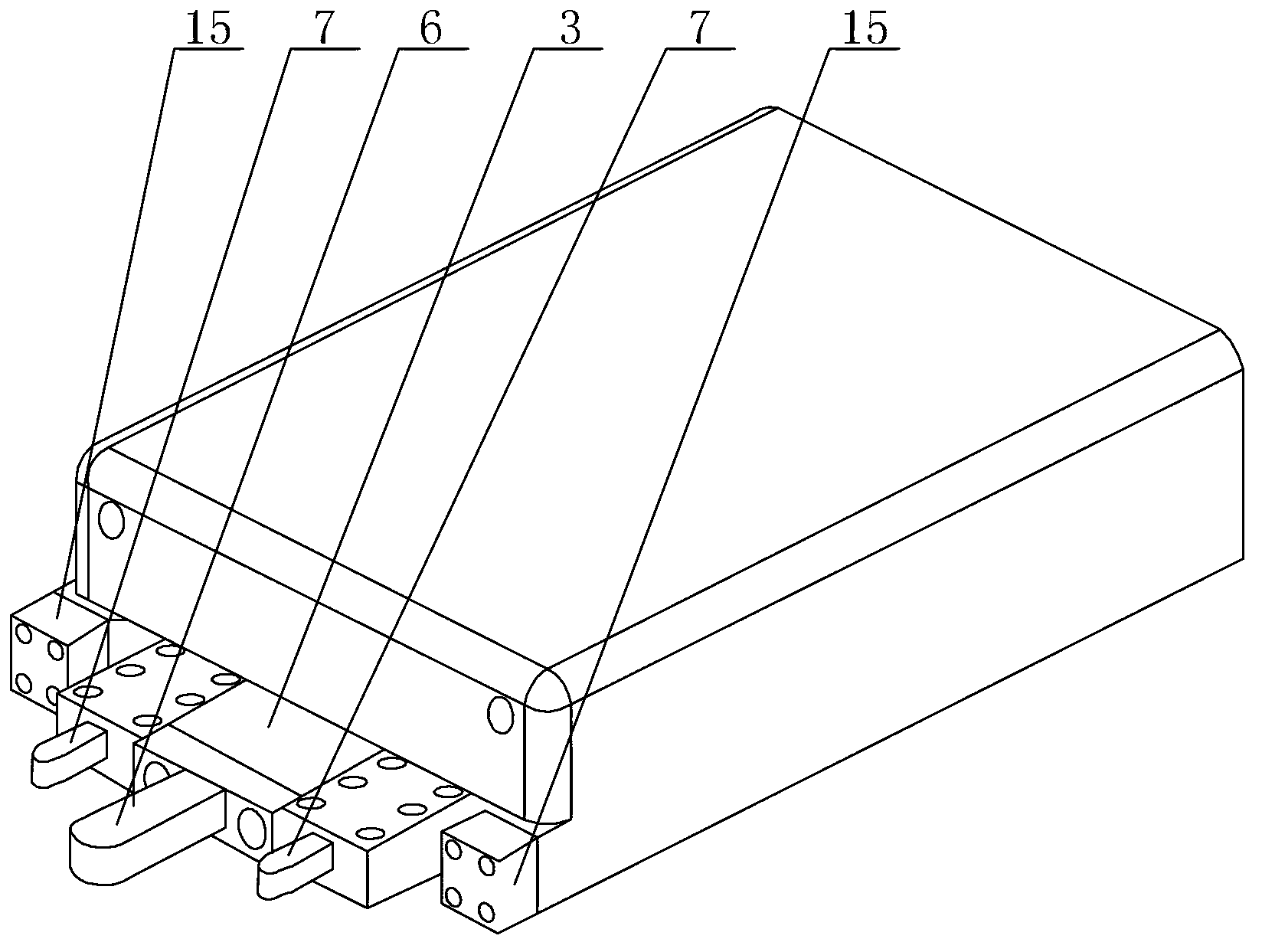
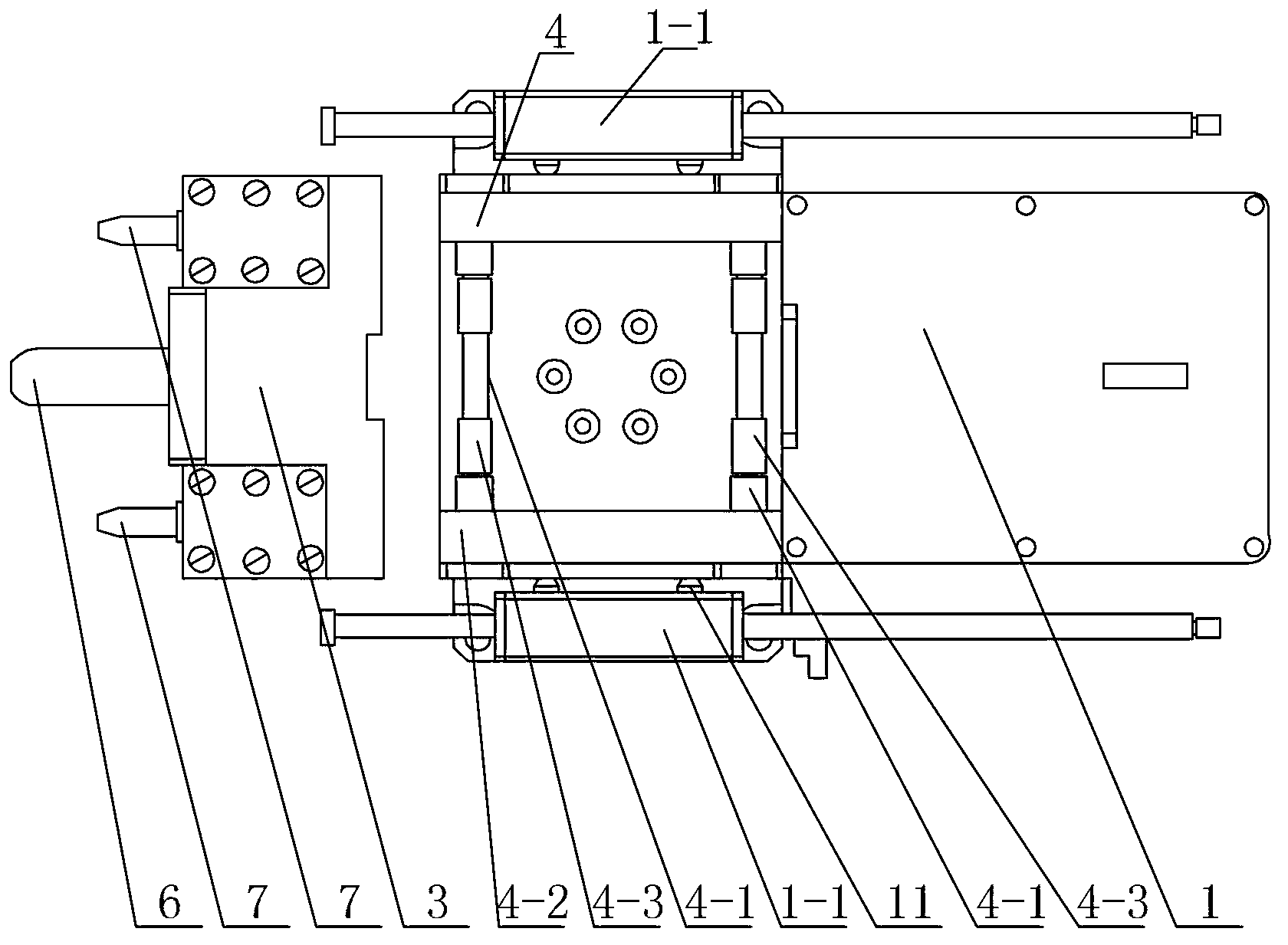
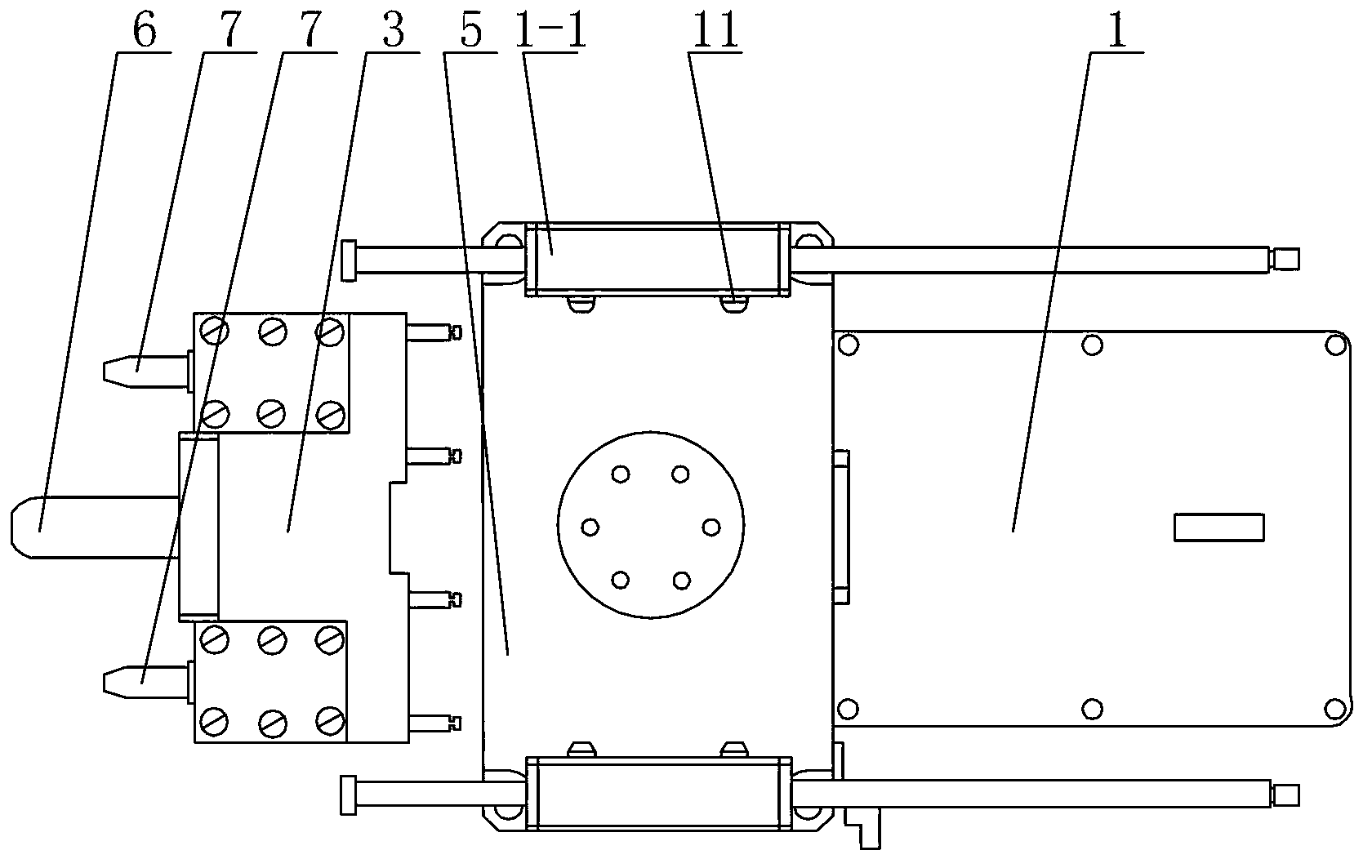
[0007] Specific implementation mode one: combine Figure 1 to Figure 5 Describe this embodiment, an adaptive docking automatic charging device described in this embodiment includes a charging body and a power receiving body, and the charging body includes a charging base 1, a charging contact platform 3, a horizontal movement mechanism 4, and a central rotation mechanism 5 1. Positioning guide head 6 and two charging contacts 7, the power receiving body includes a power receiving base 8, a sensor 9 and two power receiving contacts 10, and a stopper is respectively provided on both sides of the upper surface of the charging base 1 1-1, and the center line of each block 1-1 along the length direction is parallel to the center line of the charging base 1 along the length direction, the central rotation mechanism 5 is installed on the upper surface of the charging base 1, and the horizontal movement mechanism 4 is installed On the upper surface of the central rotating mechanism 5,...
specific Embodiment approach 2
[0009] Specific implementation mode two: knot Figure 1 to Figure 5 Describe this embodiment, the horizontal movement mechanism 4 of an adaptive docking automatic charging device described in this embodiment includes two round rods 4-1, two sliders 4-2 and four springs 4-3, two sliders Blocks 4-2 are arranged side by side in parallel, two round rods 4-1 are arranged side by side in parallel between two sliders 4-2, two round rods 4-1 and two sliders 4-2 form a rectangular frame, each The two ends of each round rod 4-1 are equipped with a spring 4-3 respectively, and the charging contact platform 3 is installed on the two round rods 4-1, and the charging contact platform 3 can be horizontal along the two round rods 4-1. move.
[0010] The technical effect of this embodiment is: the charging contact platform 3 can move freely horizontally on the two round rods 4-1 so that the two charging contacts 7 can be inserted into the corresponding power receiving contacts 10, and the fou...
specific Embodiment approach 3
[0012] Specific implementation mode three: combination Figure 1 to Figure 5 To illustrate this embodiment, two spring stop pins 11 are arranged side by side between the inner side of each block 1 - 1 of the self-adaptive docking automatic charging device and the side corresponding to the central rotation mechanism 5 .
[0013] The technical effect of this embodiment is: so set, the spring stop pin 11 can ensure that the central rotating mechanism 5 returns to its original position after the robot is fully charged.
[0014] Other components and connections are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More