

High-speed translational movement parallel mechanism with three degrees of freedom
A technology of translational motion and degree of freedom, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of weak attitude restraint ability and difficult attitude control, and achieve improved ability to resist lateral loads, strong restraint ability, high speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
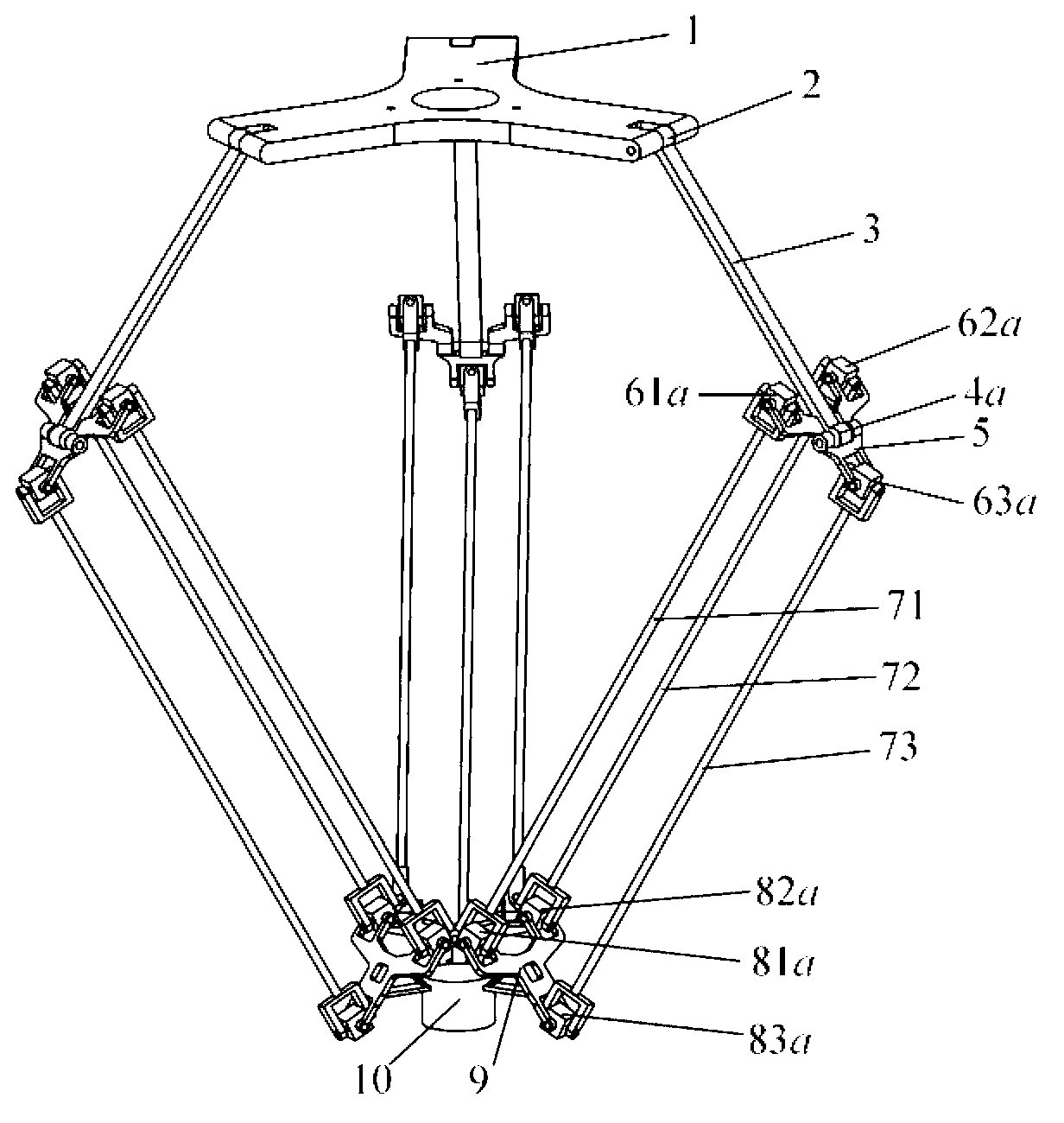
[0018] The overall structure of the three-degree-of-freedom high-speed translational motion parallel mechanism of the present invention is as follows: figure 1 As shown, in addition to the above-mentioned structural features, the axes of the first rotating pair 2 connecting the driving arm 3 and the fixed platform 1 in the three motion branch chains are in a plane and intersect each other to form an equilateral triangle; the driving arm 3 It is connected with the upper connecting plate 5 of the composite sub-chain by the second rotating pair 4a, and the axis of the second rotating pair 4a is parallel to the axis of the first rotating pair 2; the lower connecting plates 9 of the three composite sub-chains are respectively connected with The inclined planes of the three space tetrahedrons evenly distributed in the circumferential direction of the motion platform 10 are directly fixedly connected. Compared with the motion platform 10, the fourth Hooke hinge 81a and the fifth Hooke...
Embodiment 2
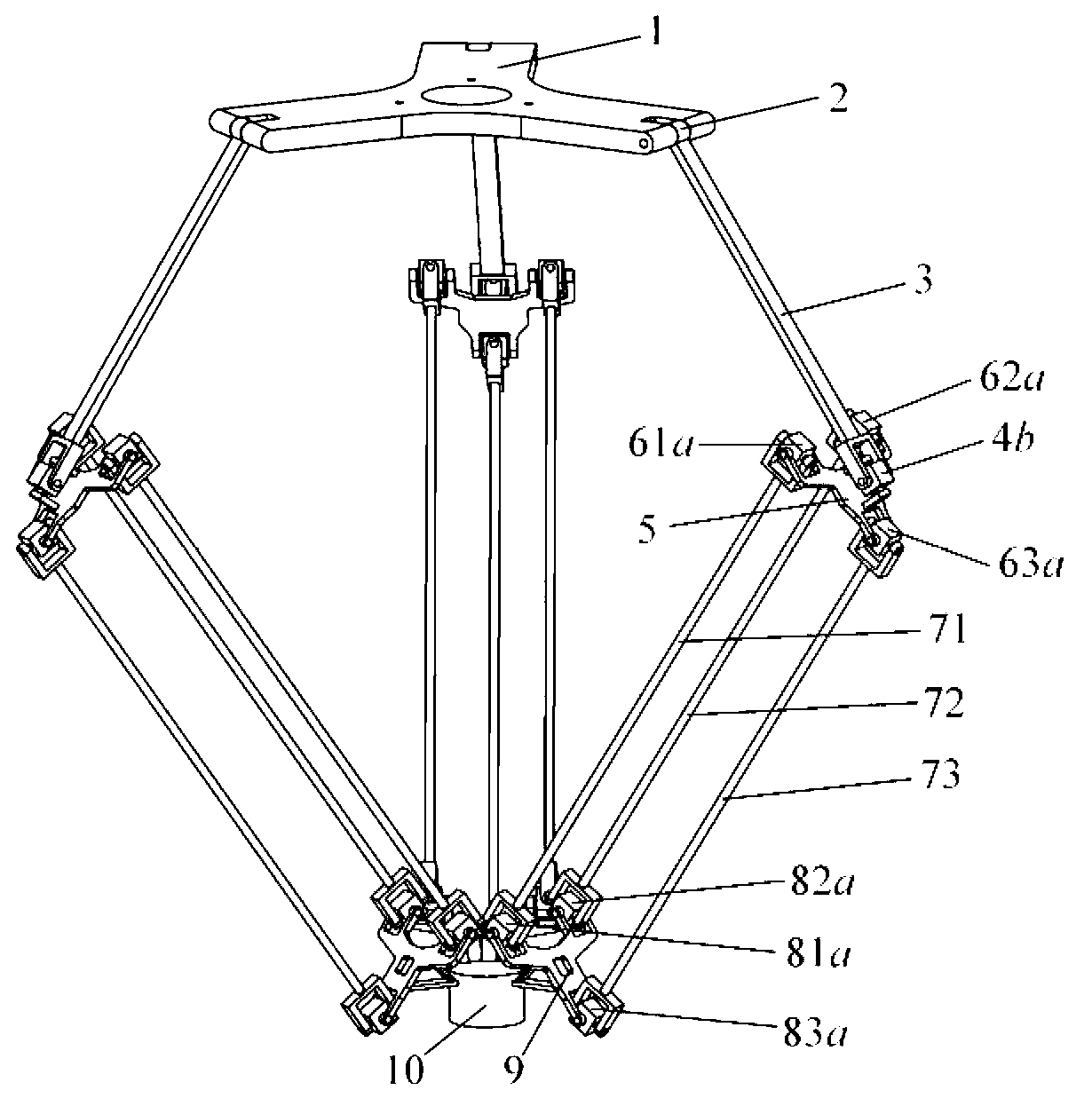
[0020] The general structure of the three-degree-of-freedom high-speed translational motion parallel mechanism of the present invention is as follows: figure 2 As shown, its structure is basically the same as that of the mechanism in Example 1, the only difference is that the driving arm 3 is connected to the upper connecting plate 5 of the composite branch chain through the seventh Hooke hinge 4b, and the seventh tiger connecting the driving arm 3 The axis of the gram hinge 4b is parallel to the axis of the first rotating pair 2 .
Embodiment 3
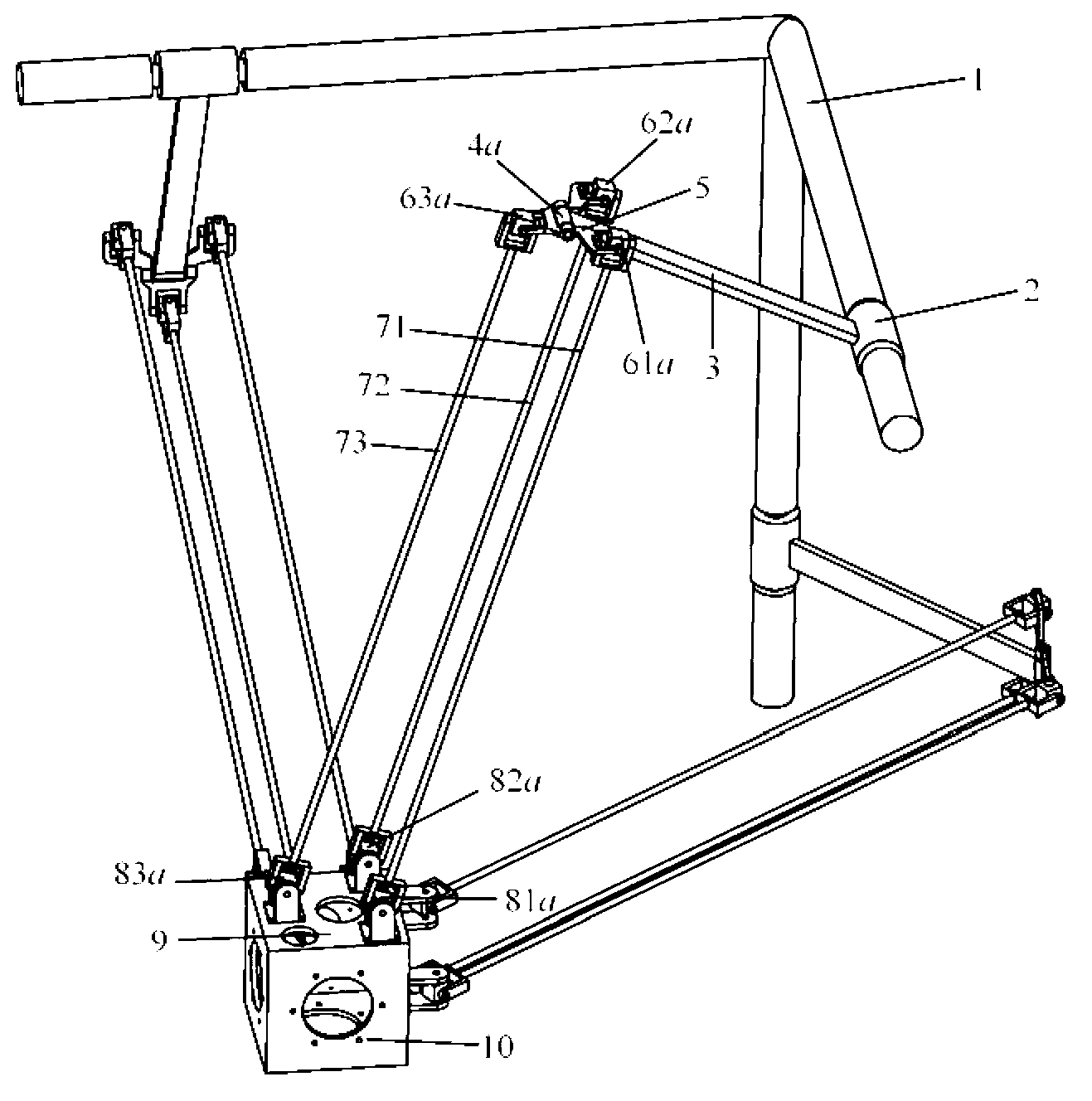
[0022] The general structure of the three-degree-of-freedom high-speed translational motion parallel mechanism of the present invention is as follows: image 3 As shown, the difference between this mechanism and the mechanism of Embodiment 1 is that the axes of the first rotating pair 2 connecting the driving arm 3 and the fixed platform 1 in the three motion branch chains intersect at one point and are arranged orthogonally to each other; the three compound The lower connection plates 9 of the sub-branches are respectively connected on three mutually orthogonal planes of the motion platform 10. With respect to the motion platform 10, the fourth Hooke hinge 81a and the second connection plate 9 of the three motion branches are connected to the lower connection plate 9. The centers of the five Hooke hinges 82a and the sixth Hooke hinges 83a form a spatial distribution.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More