

Error calibration compensation method of accelerometers in MEMS-IMU under dynamic environment
An accelerometer and compensation method technology, which is applied in the testing/calibration of speed/acceleration/shock measurement equipment, speed/acceleration/shock measurement, measurement devices, etc., and can solve problems such as unsatisfactory error compensation results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] specific implementation plan
[0021] Introduce detailed implementation scheme and steps of the present invention in conjunction with accompanying drawing:
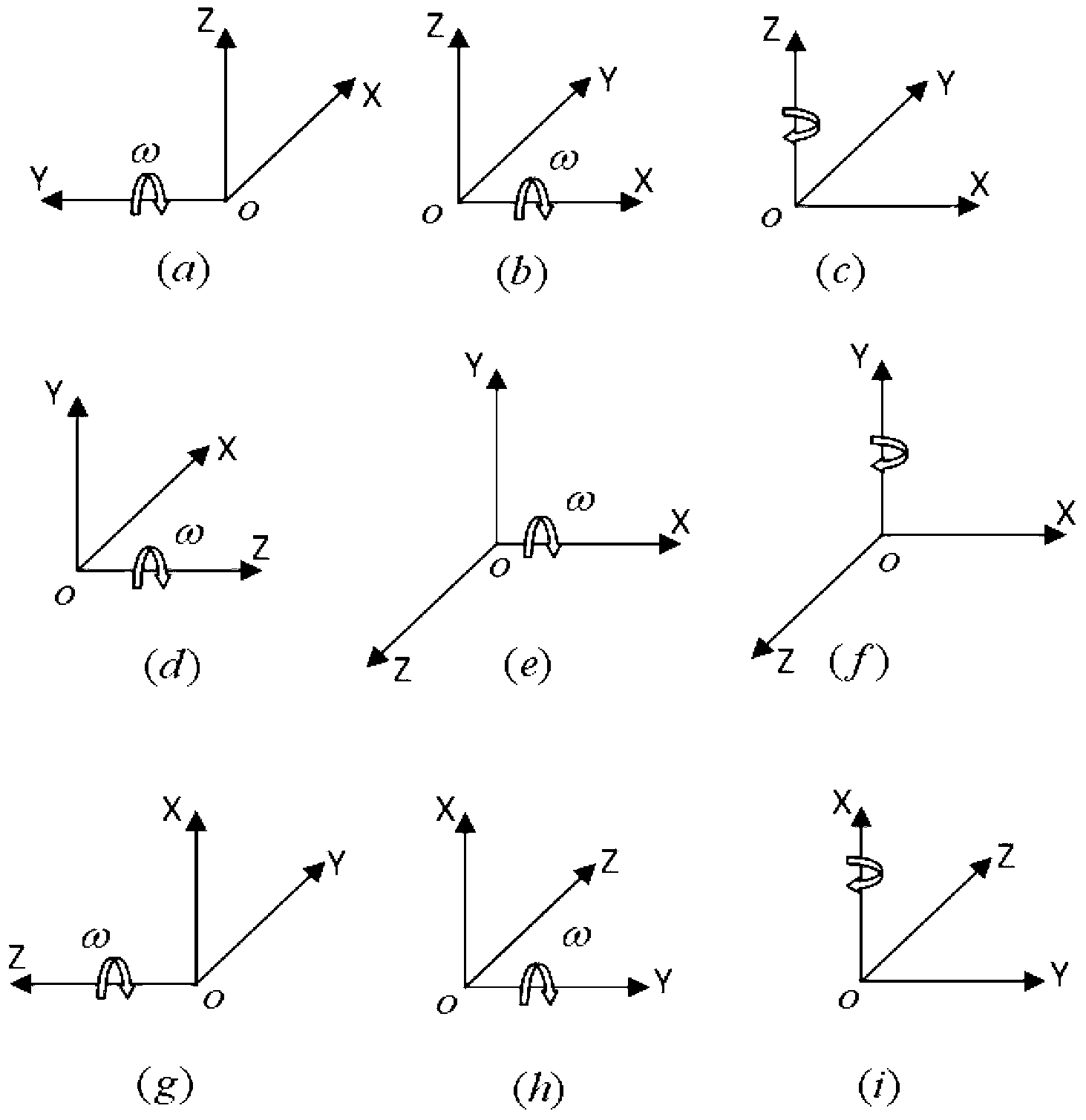
[0022] will be like figure 1 The three-axis accelerometer shown is installed on the base of the two-axis turntable. The sensitive axes of the Z accelerometer and X accelerometer point to the outer frame and the inner frame of the turntable respectively. The outer frame of the turntable points to the sky, and the inner frame points to the north direction. The sensitive axis of the meter automatically points to the west, such as figure 2 - Shown in (a).
[0023] After the IMU warms up for a period of time, fix the inner frame of the turntable, and set the outer frame of the turntable to run in rate mode, the rate is ω. At this time, the sensitive dynamic acceleration of the Z accelerometer is a=g cos(ωt), where g is the local earth Acceleration of gravity, t is the running time of the turntable, synchronously col...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More