

A Method of Tracking an Underwater Robot Using a Surface Robot
A technology for surface robots and underwater robots, which is applied in the use of re-radiation, instruments, and re-radiation of sound waves, can solve the problems of inability to meet stable tracking, high requirements, poor tracking performance, etc., to save tracking costs, inherit Good performance and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0054] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
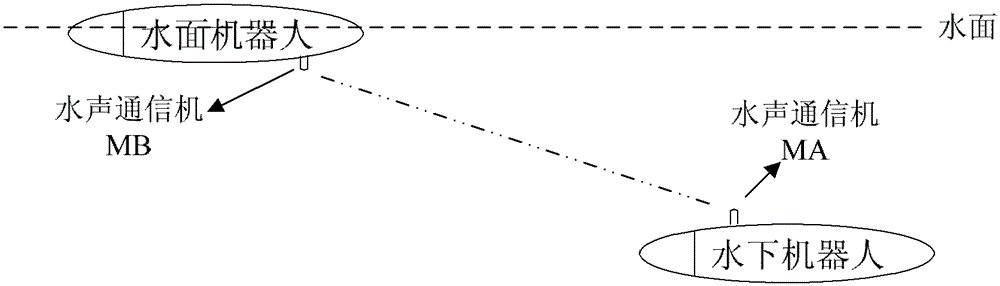
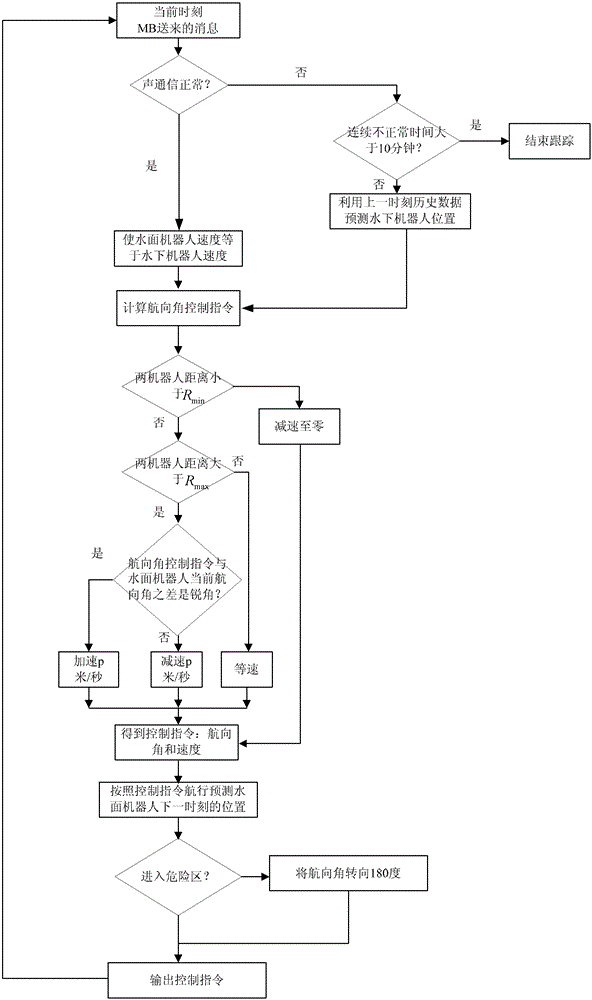
[0055]A device for tracking an underwater robot with a surface robot, such as figure 1 As shown, it consists of a surface robot and two underwater acoustic communicators. The underwater acoustic communicator MA on the underwater robot sends navigation status information to the underwater acoustic communicator MB on the surface robot in a fixed period. After MB receives, message is sent to surface robot computer, by autonomous tracking algorithm of the present invention (see figure 2 )deal with. The surface robot computer uses the navigation status information sent by the underwater robot (including the current speed, heading, position and other information of the underwater robot) and its own position information to calculate the heading angle control command. If the distance between the surface robot and the underwater robot is greater th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More