

Six-leg walking robot capable of crossing obstacles
A technology of walking robot and ability, which is applied in the direction of motor vehicles, transportation and packaging, etc., and can solve the problem of insufficient obstacle-surmounting ability of hexapod walking robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings.
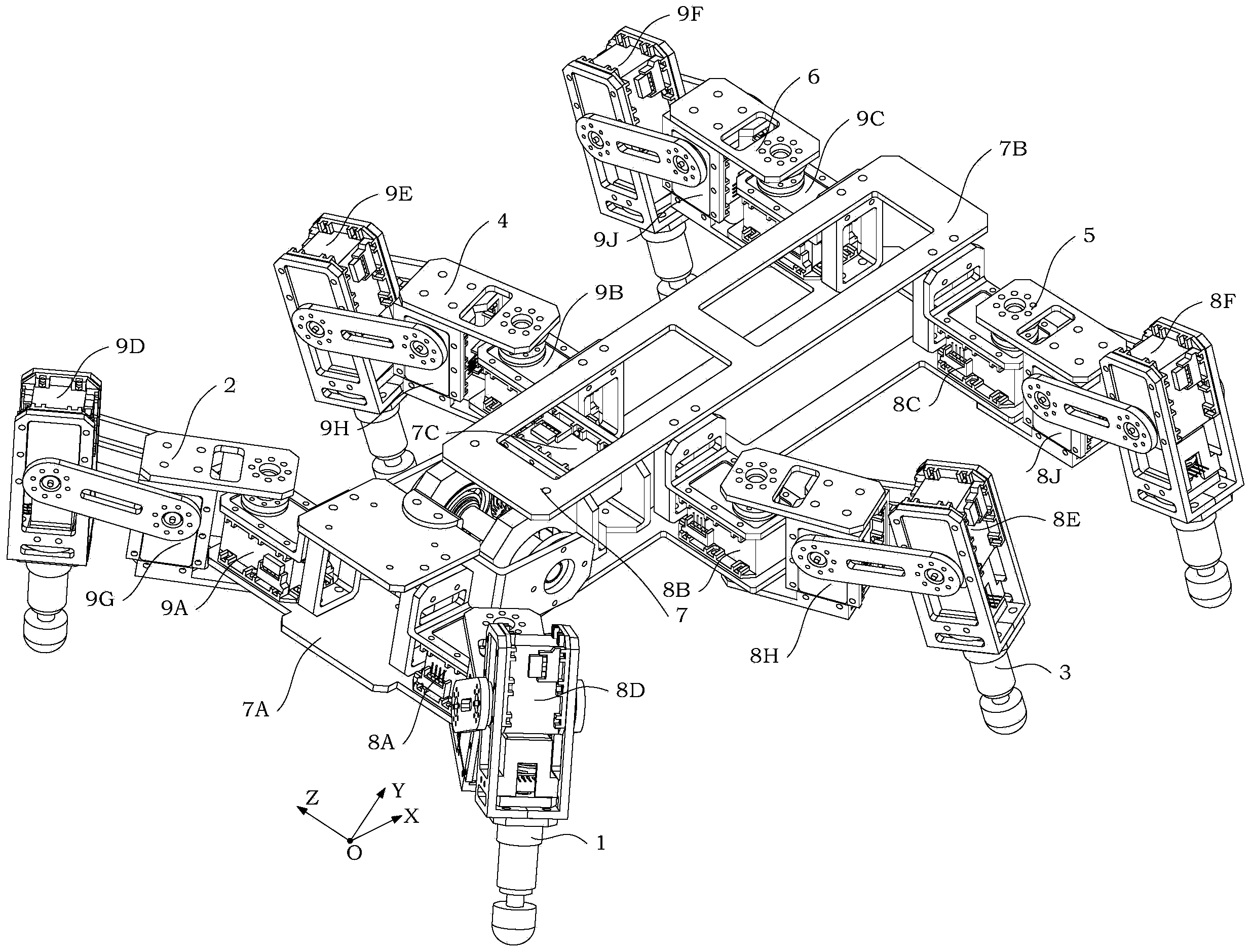
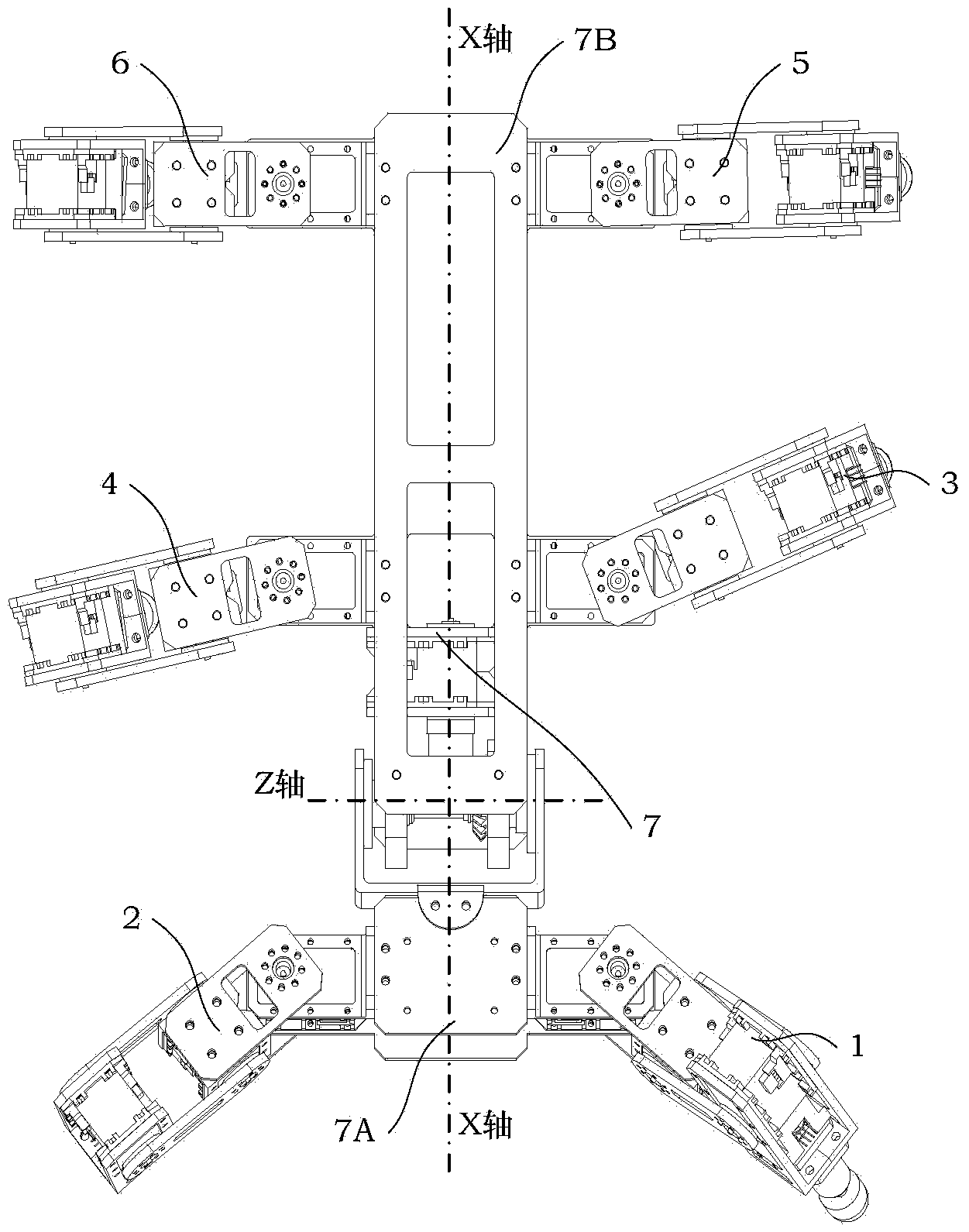
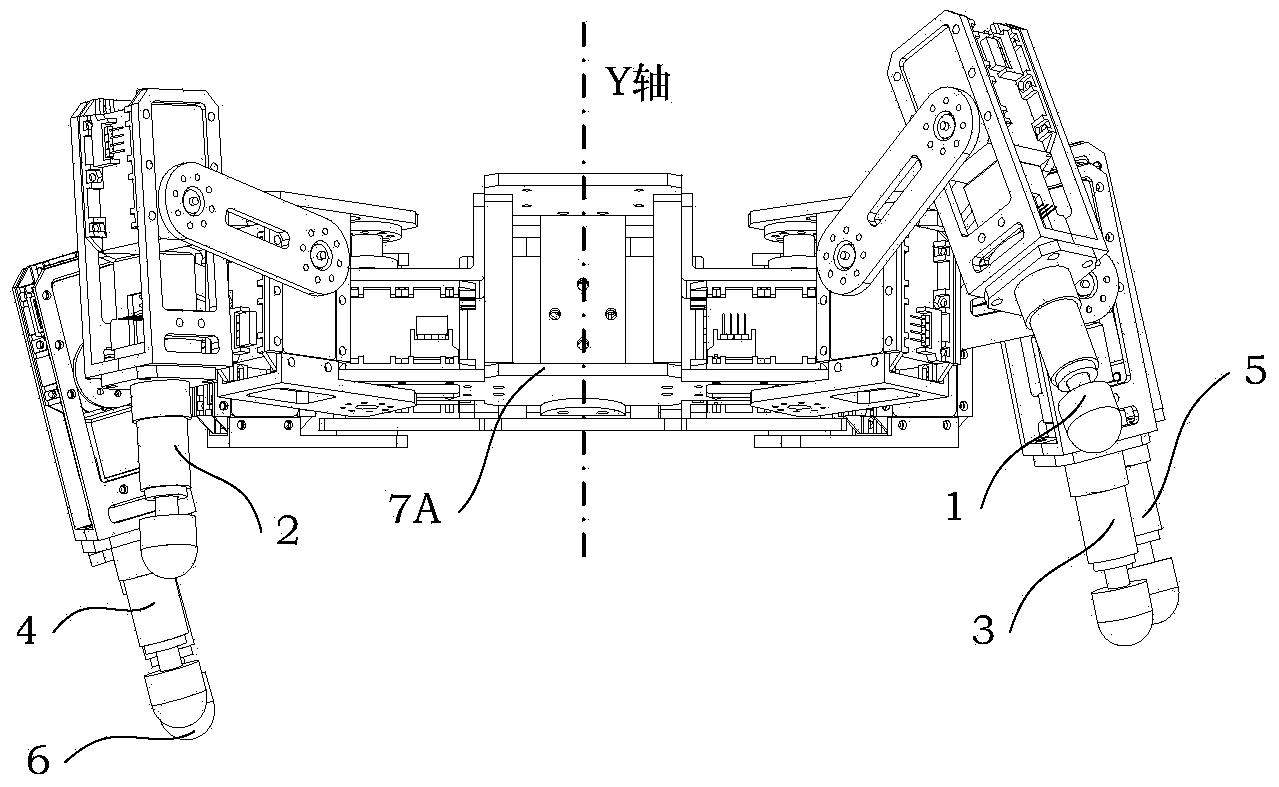
[0039] see figure 1 , Figure 1A , Figure 1B As shown, a hexapod walking robot with obstacle-surmounting ability of the present invention includes a left front leg 1, a right front leg 2, a left middle leg 3, a right middle leg 4, a left rear leg 5, and a right rear leg. The legs 6 and the trunk body 7; the trunk body 7 is composed of a front body 7A and a rear body 7B. Among them, the left front leg 1, the right front leg 2, the left middle leg 3, the right middle leg 4, the left rear leg 5 and the right rear leg 6 have the same structure; the left front leg 1 and the right front leg 2, the left middle leg 3 and the right middle leg 4 , The left rear leg 5 and the right rear leg 6 are arranged symmetrically with the X axis of the trunk body 7 .
[0040] left front leg 1
[0041] see figure 1 , Figure 1A , Figure 1B , Figure 4 , Figure 4A , F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More