

Method for controlling error to be converged in fixed time
A technology of fixed time and control method, applied in the field of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to better illustrate the purpose and advantages of the present invention, the technical solutions are further described in detail below with reference to the accompanying drawings and examples.
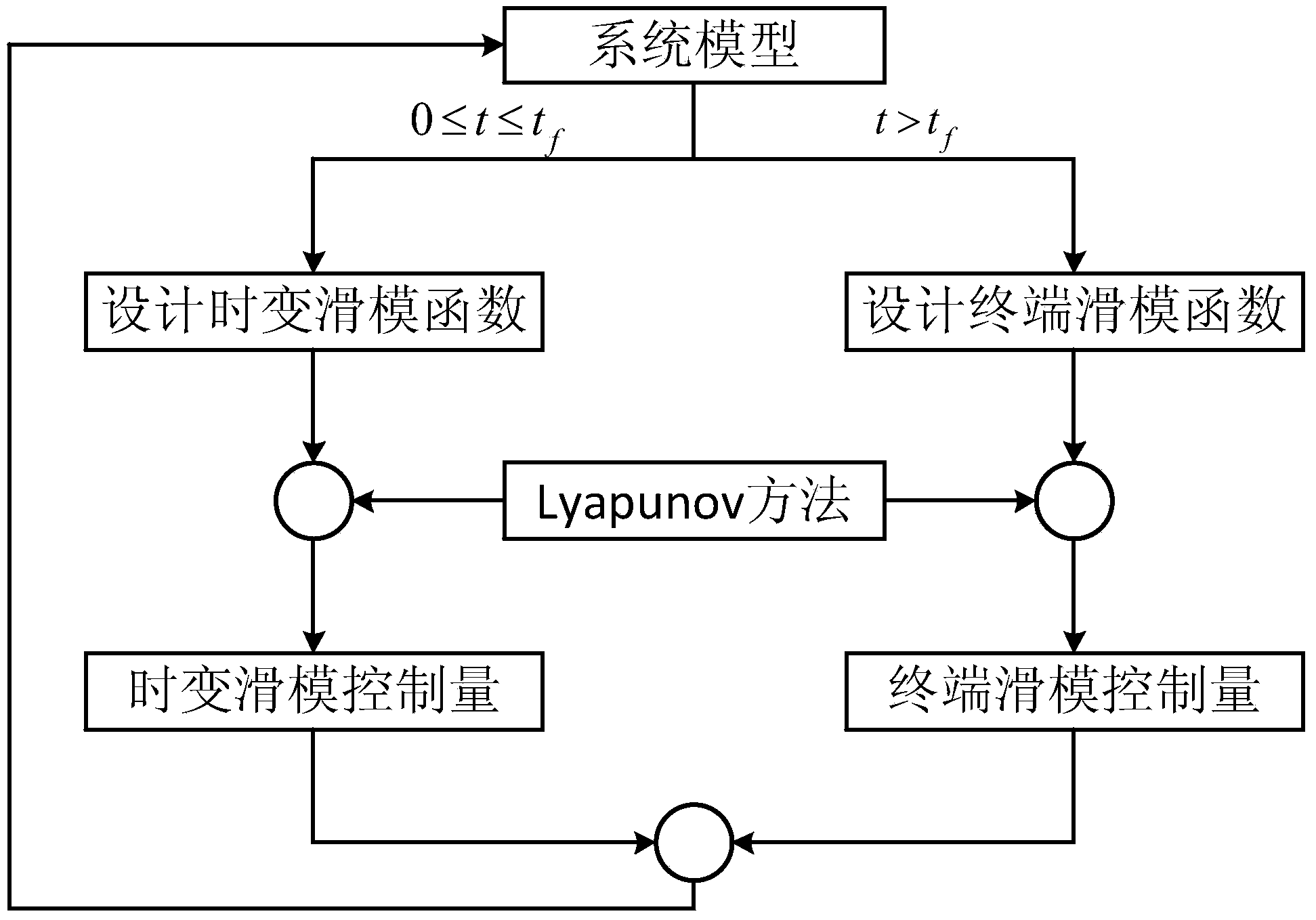
[0041] 1. Design of finite time control law.
[0042] Step 1. Establish a dynamic model of the second-order uncertain system:
[0043] x · 1 = x 2 x · 2 = f ( x ) + g ( x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More