

A Global Continuous Sliding Mode Control Method for Overhead Cranes Based on Feedforward Control
A bridge crane and control method technology, applied in the direction of self-adaptive control, general control system, control/adjustment system, etc., can solve problems such as unmatched interference, large control gain, and influence on system stability, etc., so as to improve production Efficiency and safety performance, reduced control gain, and improved availability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0100] Embodiment 1. A global continuous sliding mode control method for bridge hoisting based on feedforward control, comprising the following steps:
[0101] Step 1, establish a kinetic model;
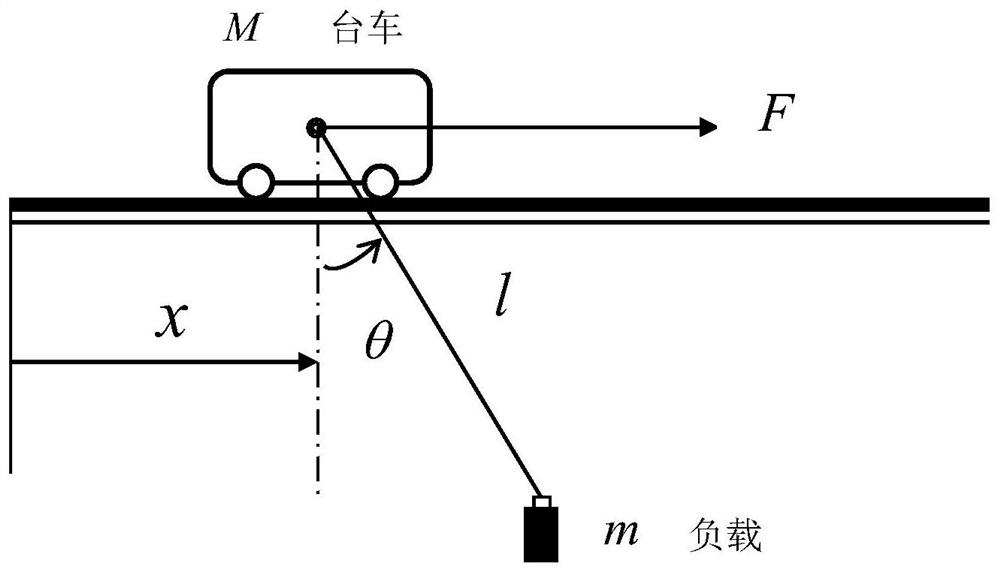
[0102] The structure diagram of the system model of the bridge crane is as follows figure 1 As shown in the figure, the mass of a trolley set on the bridge is M, and the load of mass m is hung under the trolley through a sling of length l to move under the underactuated mechanical system, and the Euler-Lage of the model is performed. Transforming the Longian equation, the dynamic equation of this overhead crane system can be expressed as:
[0103]
[0104]
[0105] Among them, M is the mass of the trolley, m is the mass of the load, and the displacement of the trolley is expressed as x, is the speed of the trolley, is the acceleration of the trolley, and the swing angle of the load is expressed as θ, is the speed of the load swing angle, is the acceleration of the load...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More