

PMSM (permanent-magnet synchronous motor) control system based on super-twisted SMC (sliding mode control) algorithm and work method of PMSM control system
A permanent magnet synchronous motor and control system technology, which is applied in the control system, motor control, vector control system, etc., can solve the problems of power factor reduction, leakage inductance and voltage drop increase, and the limitation of motor speed regulation range, etc., to eliminate Effects of chattering and increased approach speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
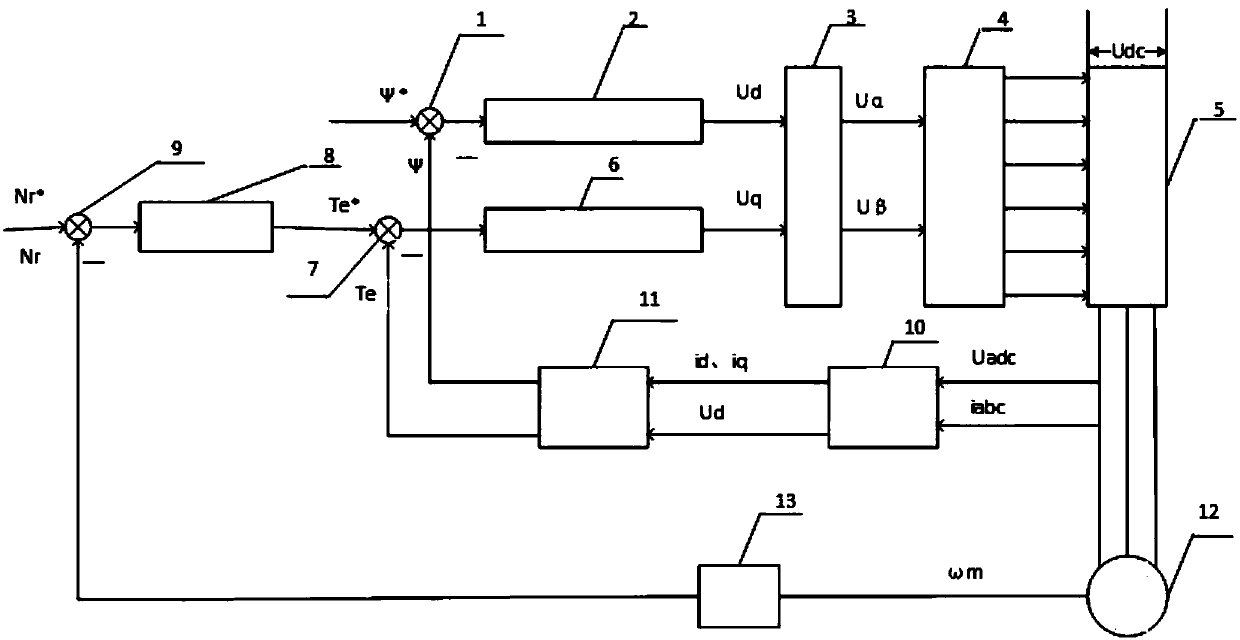
[0089] A permanent magnet synchronous motor control system based on super twisted synchronous film variable structure algorithm, such as figure 2 As shown, it includes a first comparison unit 1, a first super twisted slide film control module 2, a park inverse transformation module 3, a SVPWM module 4, an inverter module 5, a second super twisted slide film control module 6, and a second comparison unit 7. Speed regulator 8, third comparison unit 9, 3 / 2 conversion module 10, flux linkage torque estimation unit 11, permanent magnet synchronous motor module 12, speed calculation unit 13;
[0090] The permanent magnet synchronous motor module 12, the speed calculation unit 13, the third comparison unit 9, the speed regulator 8, and the second comparison unit 7 are sequentially connected, the inverter module 5, the 3 / 2 conversion module 10, and the flux linkage torque estimation unit 11 are connected sequentially, and the flux linkage torque estimation unit 11 is respectively con...
Embodiment 2
[0097] The working method of the permanent magnet synchronous motor control system based on the super-twisted synchronous film variable structure algorithm described in embodiment 1 includes:
[0098] (1) Calculate the rotational speed N of the permanent magnet synchronous motor module 12 by the speed calculation unit 13 r , the calculation formula is shown in formula (I):
[0099]
[0100] In formula (I), ω m refers to the mechanical angle of the permanent magnet synchronous motor module 12;
[0101] (2) Proportional-integral controller is used in the speed control outer loop module, and the given speed is obtained through the third comparison unit 9 and the rotational speed N obtained in step (1) r The difference, the difference is input to the speed regulator 8;
[0102] (3) Obtained by the speed regulator 8 is the torque comparison data obtained by the speed regulator 8; K p is the proportional coefficient, K i is the integral coefficient;
[0103] Get feedb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More