

Foot Vibration Reduction Method of Biped Running Robot
A robot and foot technology, applied in the field of robots, can solve the problems of increased impact force on the ground, affecting the running speed of the robot, and large impact force on the ground, and achieves the effects of low production cost, simple structure, and improved running speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the technical solution and characteristics of the present invention clearer, the present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings. Here, the following examples are used to illustrate the present invention, but not to limit the scope of the present invention.
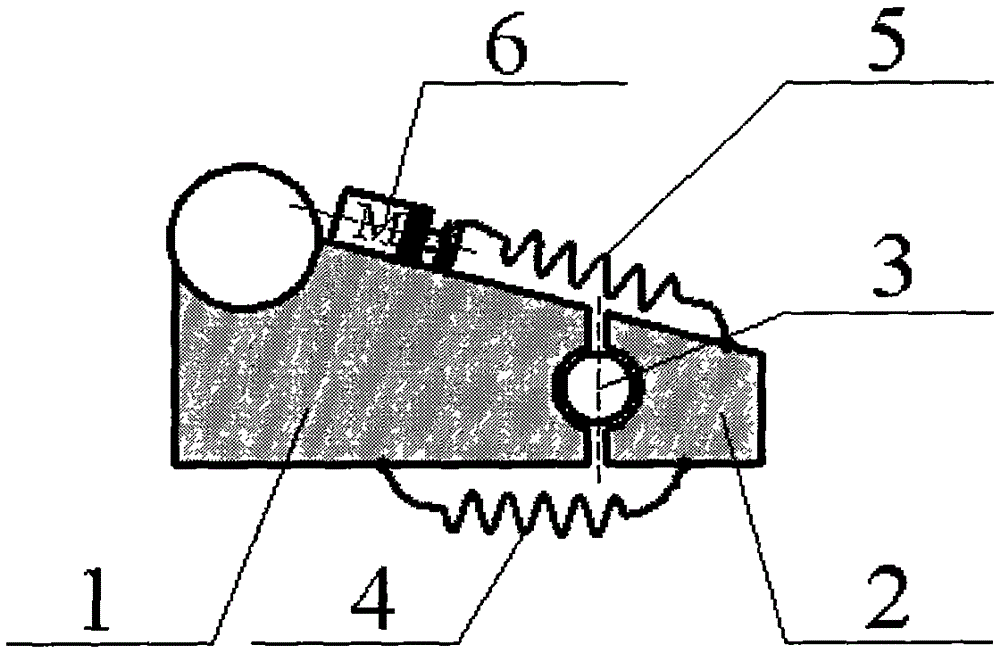
[0015] Such as figure 1 As shown, the foot vibration reduction method of a biped running robot includes a foot plate 1, a toe 2, a hinge 3, an upper elastic driver 5, a lower elastic driver 4, and a DC motor 6. The foot plate 1 and toe 2 of the robot adopt an active connection mode, and the DC The motor 6 is fixedly connected to the foot plate 1 top of the robot by bolts.
[0016] The active connection mode adopted by the foot plate 1 and the toe 2 is a hinge 3 connection.
[0017] The upper elastic driver 5 of the present invention is installed on the top of the foot plate 1 and the toe 2; the lower elastic driver 4 is ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More