

Spatial path tracking method of continuous robot
A space path, robot technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The space path tracking method for a continuous robot provided by the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0080] 1 technical solution
[0081] 1.1 Structural analysis of continuous robot body
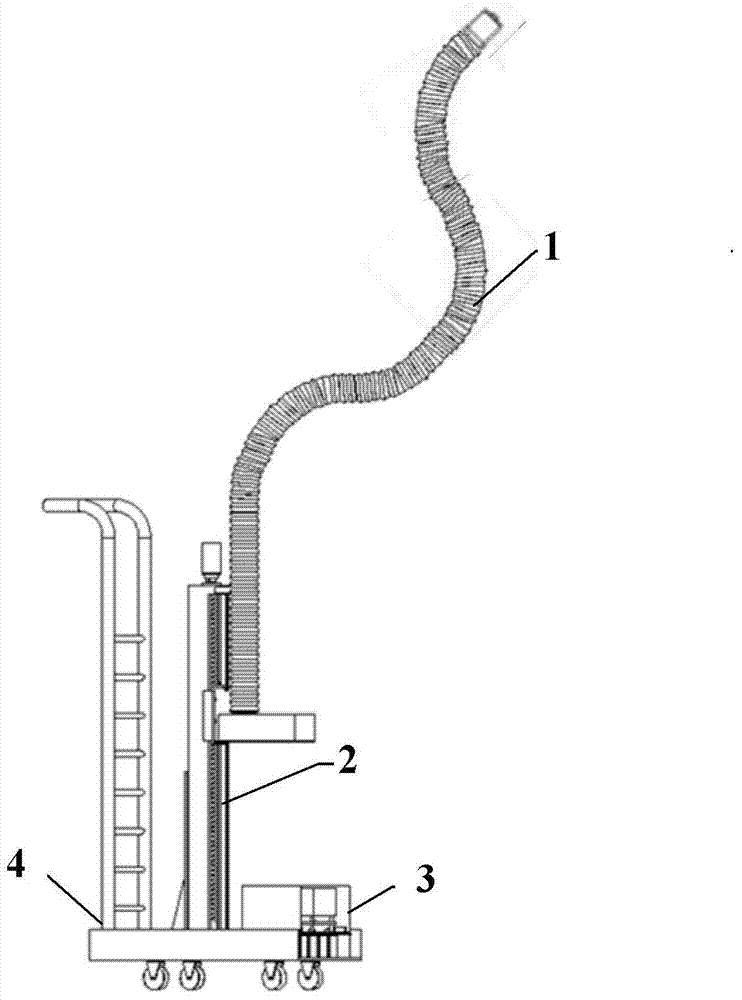
[0082] The continuous robot is a new type of bionic robot with high flexibility and suppleness. It generally consists of a flexible mechanism 1, a telescopic mechanism 2, a control system 3 and a mobile platform 4, such as figure 1 As shown; because the flexible mechanism 1 is similar to a meandering snake, it is called a snake arm here; the snake arm is usually a series mechanism composed of multiple structural units, and each structural unit is called a joint segment, which has two degrees of freedom of rotation and bending; The telescopic mechanism 2 has one degree of freedom and can realize one-dimensional precise movement. The lifting platform on the telescopic mechanism 2 is called th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More