

A six-degree-of-freedom welding robot mechanism
A welding robot and rotary mechanism technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of small working space, short trouble-free running time, large moment of inertia, etc. Accuracy, good dynamics, the effect of reducing the moment of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
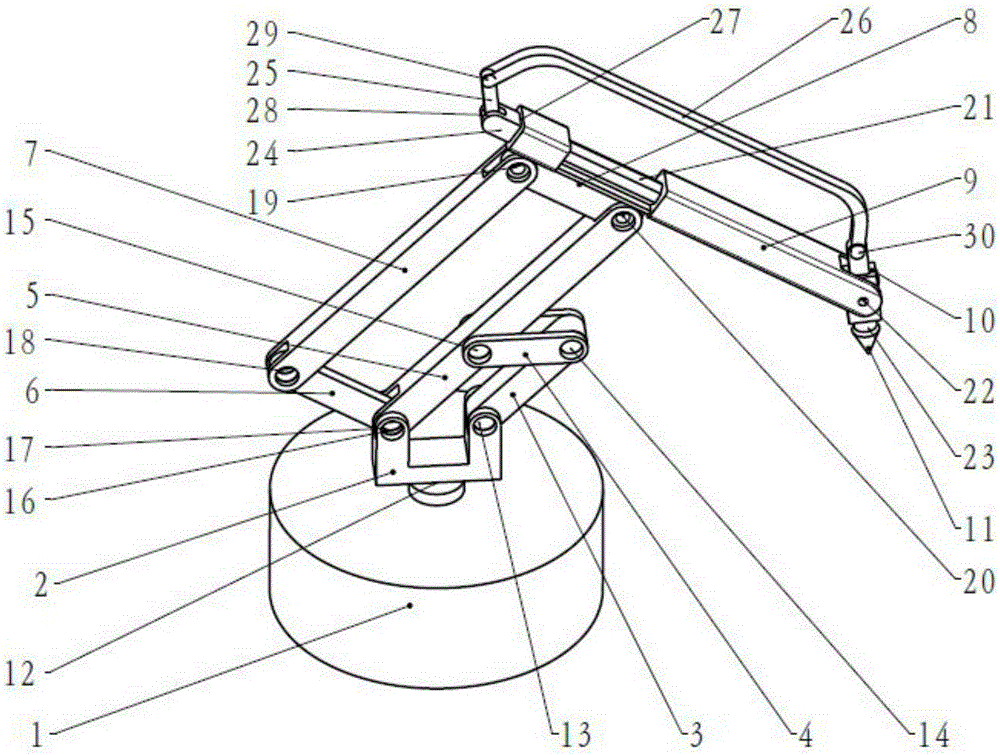
[0029] control figure 1 , 2 , 3 and 4, a six-degree-of-freedom high-precision advanced welding robot mechanism, including a waist rotation mechanism, a shoulder swing mechanism, an elbow rotation mechanism, a forearm rotation mechanism, a wrist rotation mechanism, a welding torch holder rotation mechanism and a machine base 1.
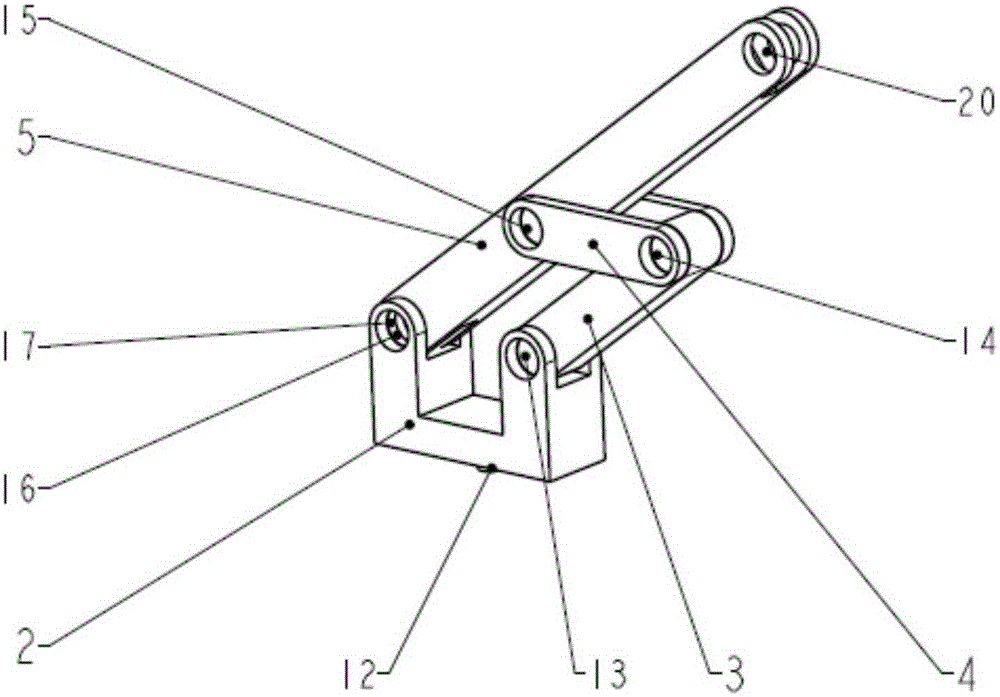
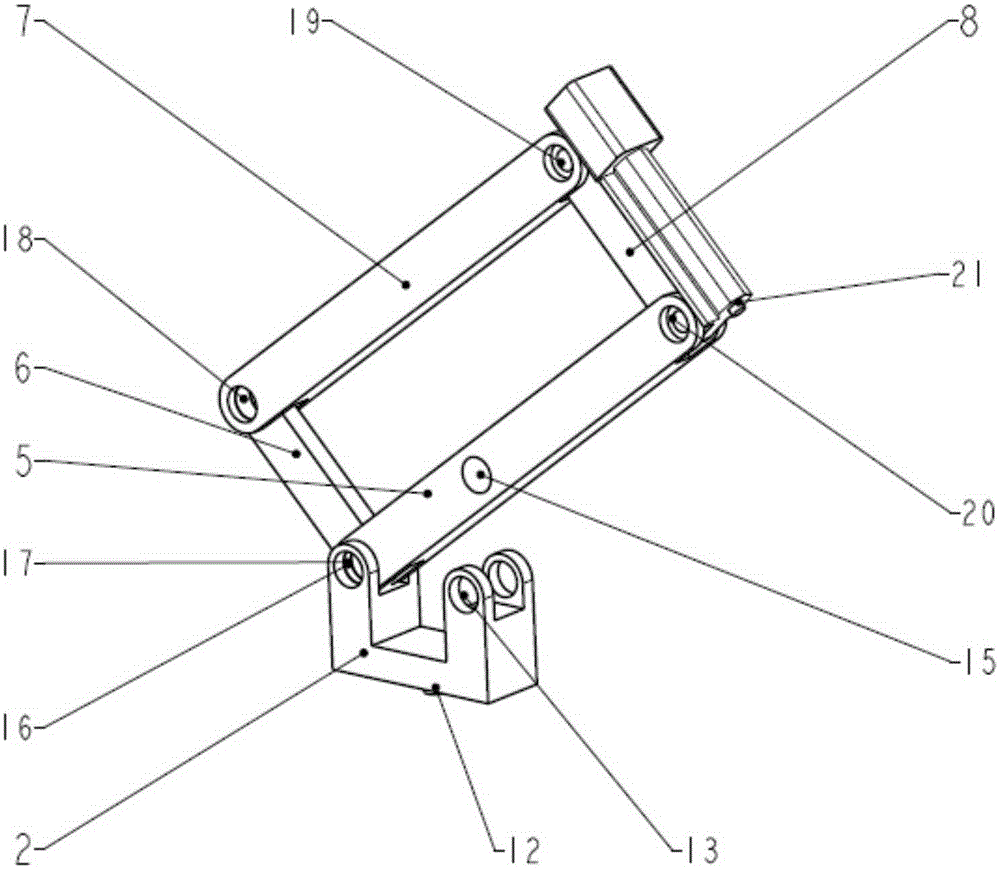
[0030] control figure 1 , the waist turning mechanism of the robot includes a rotating platform 2, the rotating platform 2 is installed on the base 1 through a first rotating pair 12, and the first rotating pair 12 is driven by a first servo motor.
[0031] control figure 1 , 2 , The shoulder swing mechanism includes a first active rod 3 , a first connecting rod 4 and a second connecting rod 5 . The first active rod 3 is connected with the rotating platform 2 through the second rotating pair 13, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More