

A six-degree-of-freedom industrial robot driven by a ball screw
An industrial robot, ball screw technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of large impact on robot accuracy, small working space, large cumulative error, etc., to improve dynamic performance, convenient and accurate. The effect of controlling and reducing the load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
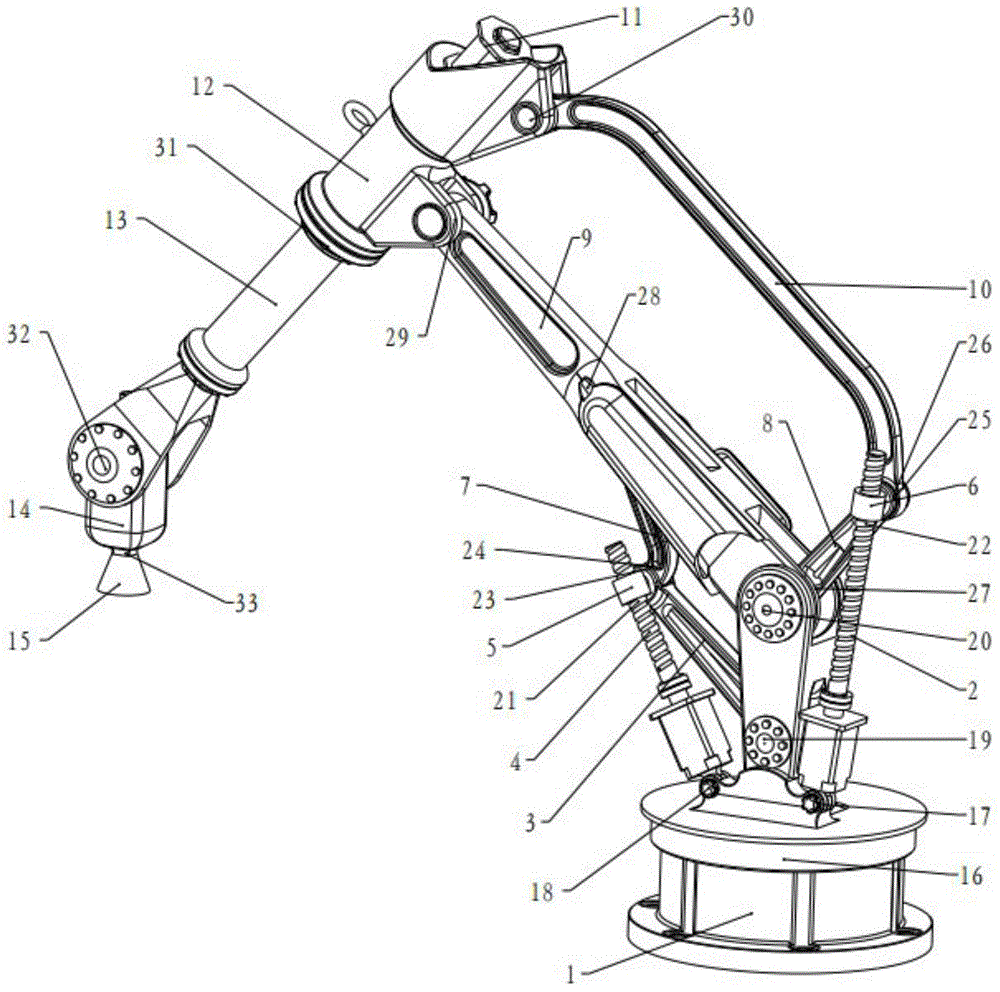
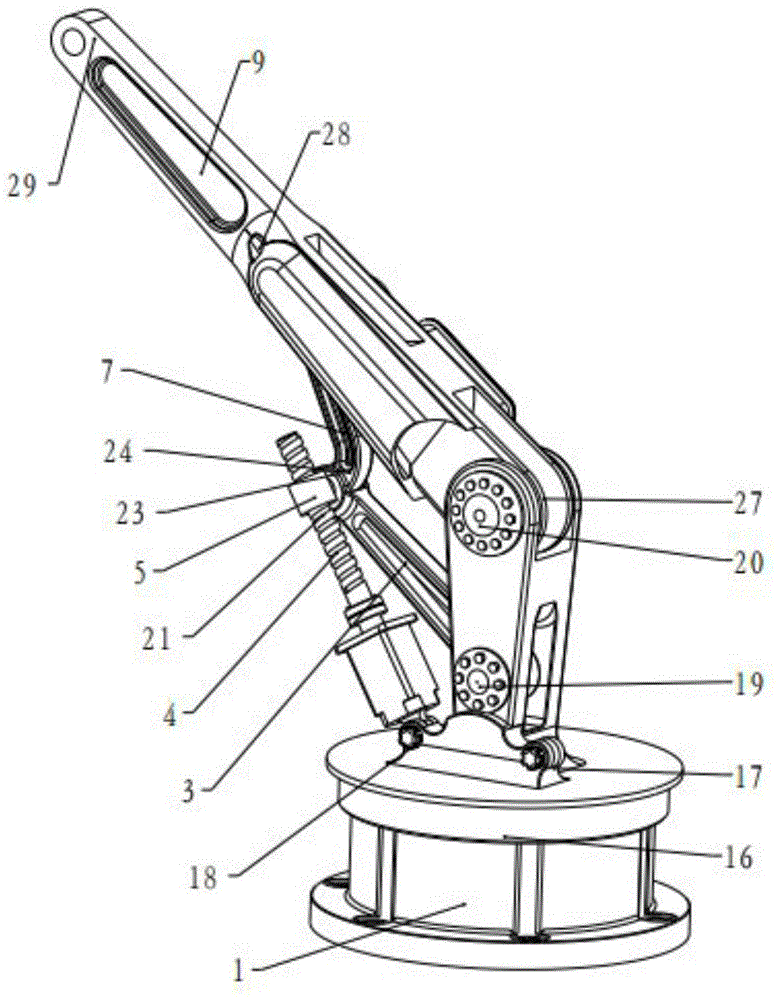
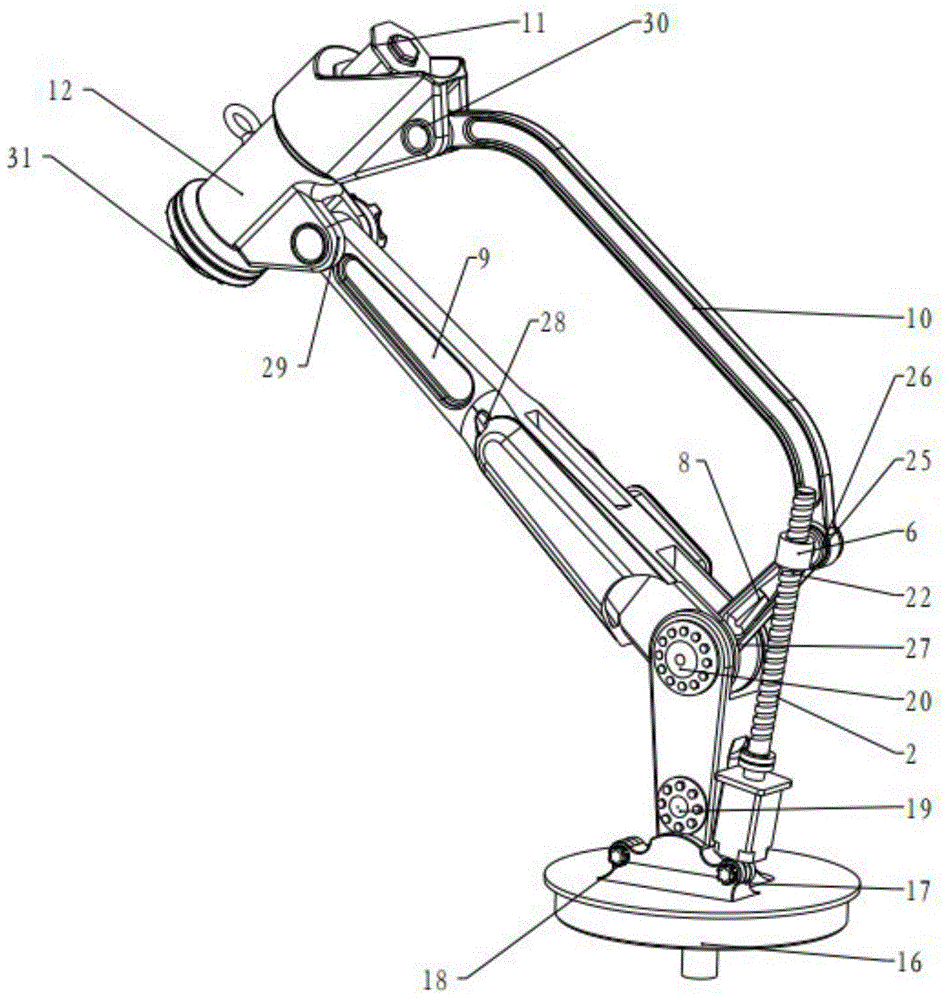
[0025] control figure 1 , 2 , 3 and 4, a six-degree-of-freedom industrial robot driven by a ball screw pair consists of a machine base, a rotary platform, a waist rotary mechanism, a shoulder swing mechanism, an elbow rotary mechanism, a forearm rotary mechanism, a wrist rotary mechanism, and a tool holder. Institutional composition. The rotary platform 16 is installed on the machine base 1 to realize the six-degree-of-freedom movement of the whole mechanism.
[0026] control figure 1 , the waist slewing mechanism is connected to the machine base 1 by the 16th revolving pair through the slewing platform 16, and is driven by the first servo motor to realize the full circle slewing motion.
[0027] control figure 1 , 2 , The shoulder swing mechanism and the elbow rotation mechanism form a position adjustment mechanism. f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More