

A closed-loop compensation circuit for quadrature error of a vibrating silicon micromachined gyroscope
A micro-mechanical gyroscope and silicon micro-mechanical technology, which is applied in the direction of speed measurement, gyroscope/steering sensing equipment, and measurement devices by gyro effect, can solve the problems of phase shift angle change, large quadrature error residual, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
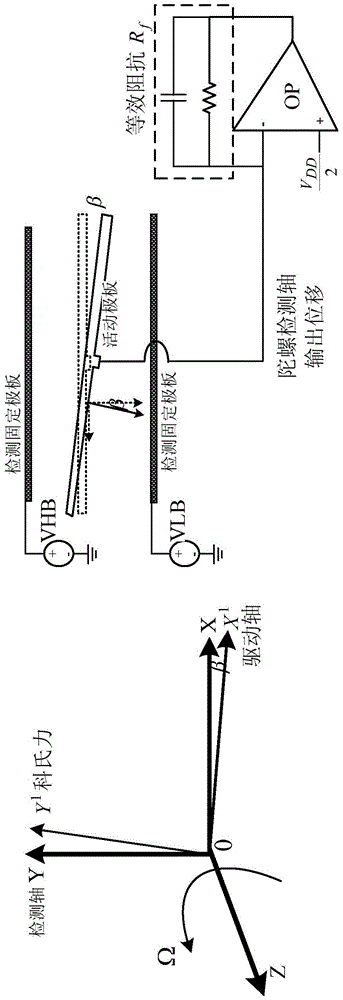
[0044] like figure 1As shown, let Y be the detection axis direction, X 1 is the direction of the driving axis, and the angle between the two deviates from the vertical direction is β; when the mass M is subjected to the electrostatic driving force Fsin(ω d t) at X 1 After directional resonance, if at the same time with the angular velocity Ω Z Rotate around the Z axis, then M is in Y due to the Coriolis force 1 direction resonance, the Y 1 The angle of deviation from the detection axis Y is β.
[0045] During the manufacturing process of the silicon micromachined gyro sensor structure, due to reasons such as process precision and material stress, the drive axis and the detection axis are n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More