

Ultrasonic probe scanning system and method for remote control
An ultrasonic probe and remote control technology, which is applied in the field of medical ultrasonic scanning, can solve problems limited to the local end, and achieve the effect of outstanding application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
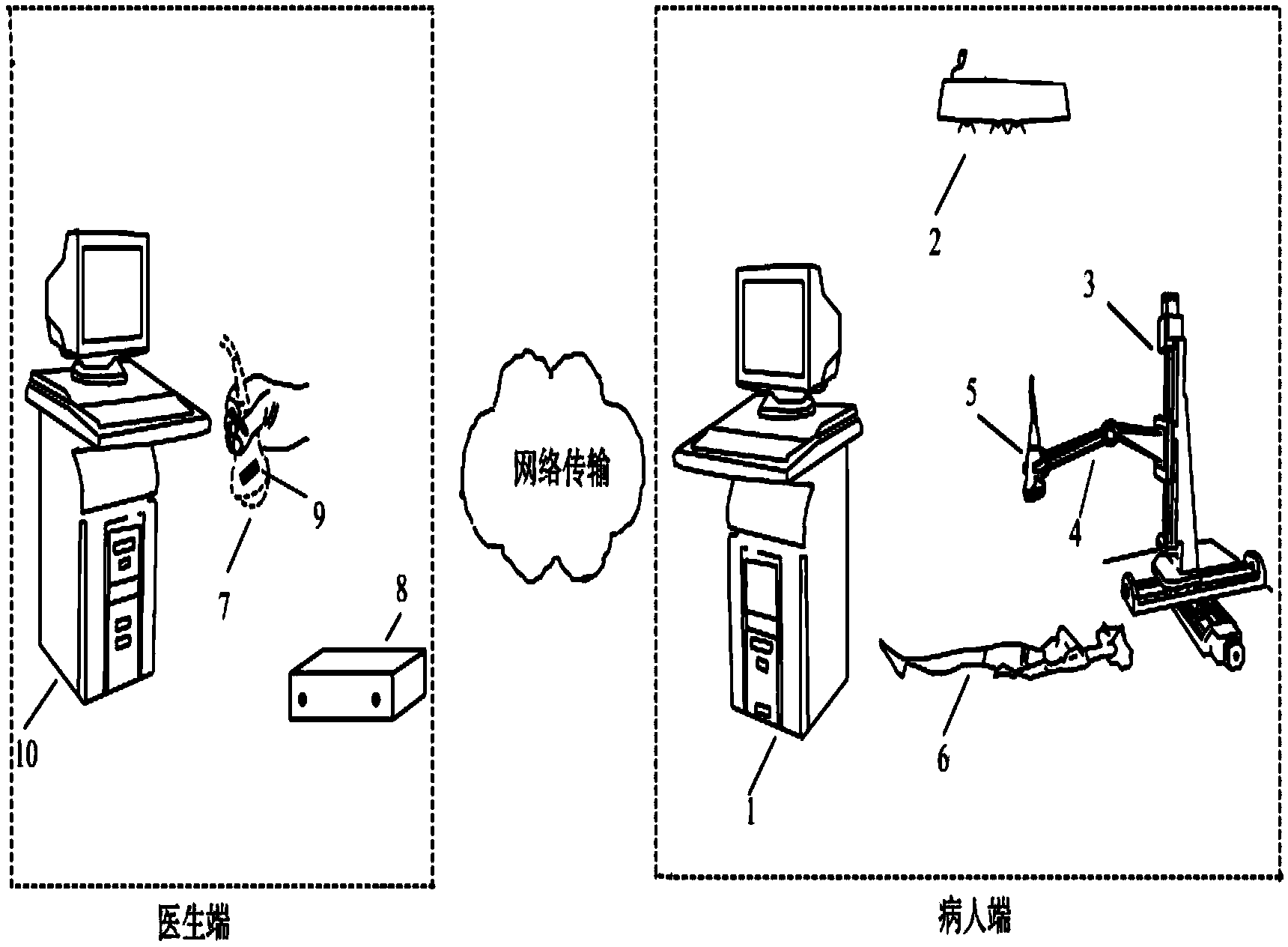
[0030] Such as figure 1 As shown, a remote-controlled ultrasonic probe scanning system in this embodiment includes: a patient-end device and a doctor-end device. The patient-end device includes: patient-end computer 1, depth camera 2, three-dimensional mobile platform 3, mechanical arm 4, ultrasonic probe 5, scanned tissue 6; the doctor-end device includes a virtual probe 7, a three-dimensional positioning device 8, Position sensor 9 and doctor end computer 10. The depth camera 2 can accurately obtain the distance between each point on the surface of the scanned tissue 6 and its camera, form a depth image, and connect to the patient computer 1 through a communication interface. The three-dimensional mobile platform 3 has a stepping motor, and the stepping motor has a motion axis, and the motion axis is fixed to a mechanical arm 4, and the mechanical arm is fixed to an ultrasonic probe 5, and the ultrasonic probe 5 is connected to the patient computer 1 to receive An ultrasou...
Embodiment 2
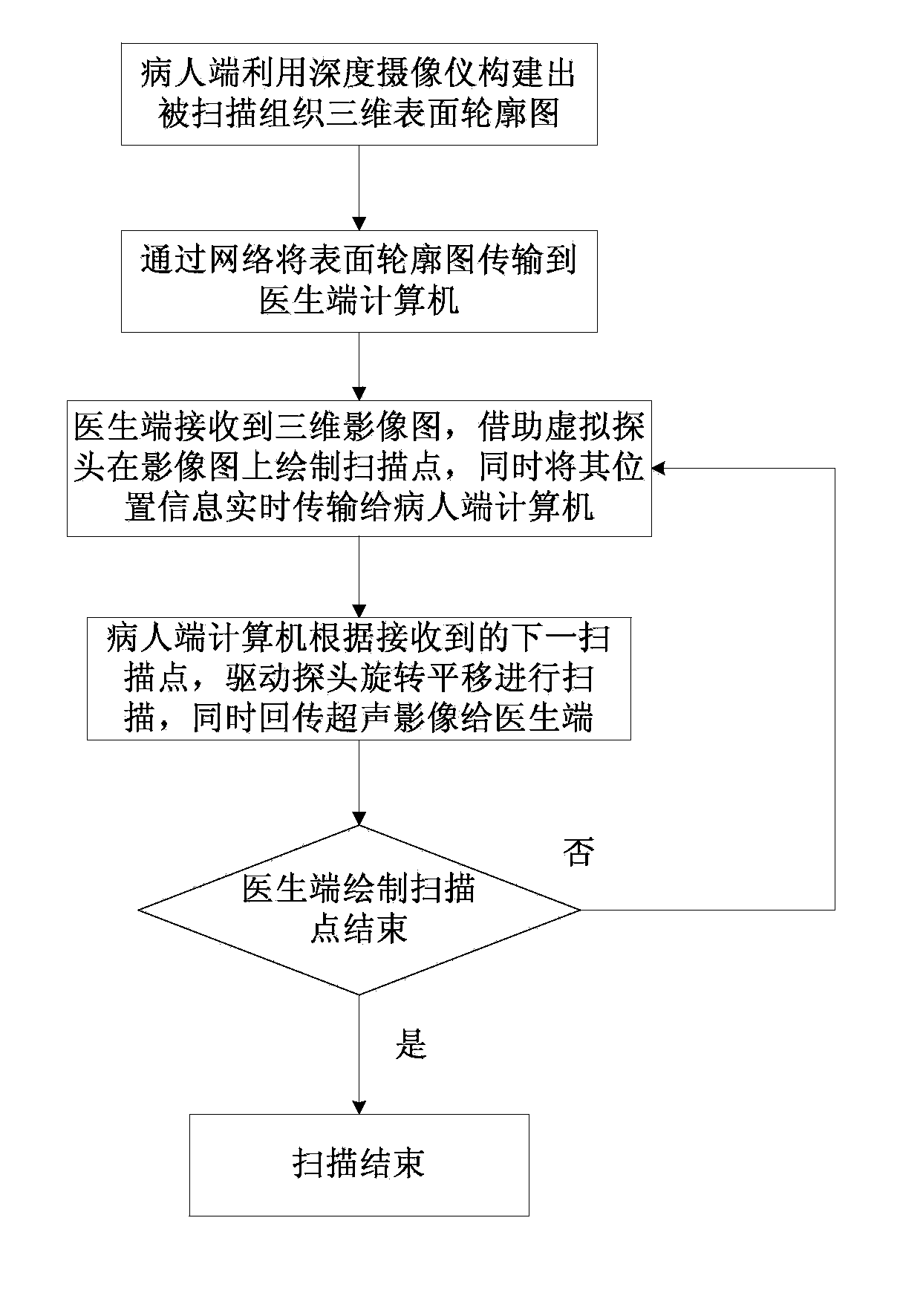
[0042] In this embodiment, the ultrasonic probe scanning system of remote control is the same as Embodiment 1, as image 3 As shown, the method for the remote-controlled ultrasonic probe scanning system of this embodiment includes the following steps:
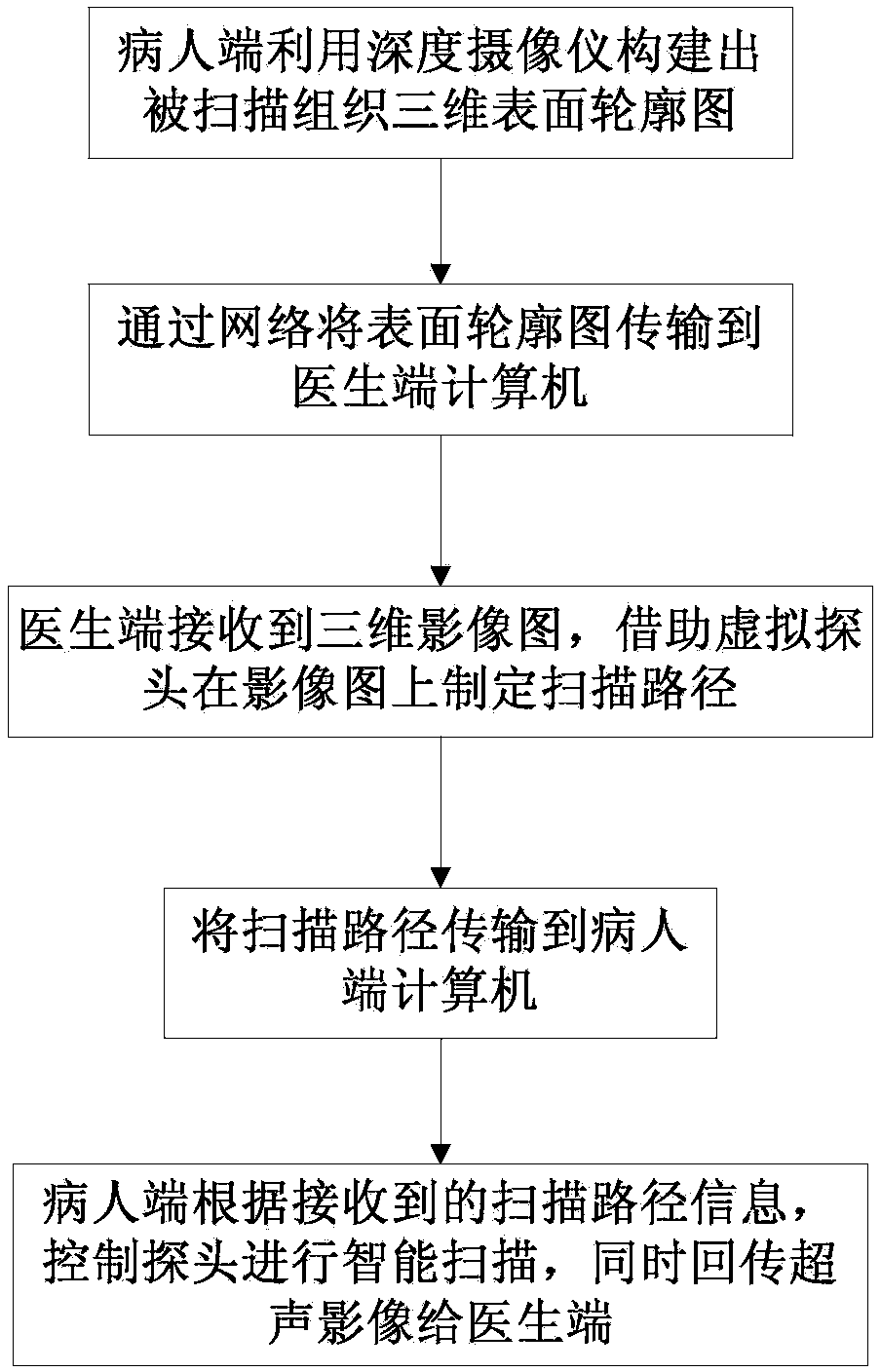
[0043] Step 1: Use the depth camera on the patient side to obtain the three-dimensional surface contour map of the scanned tissue, and transmit it to the doctor's computer through the network;
[0044] Step 2: The doctor end establishes the coordinate system T1 according to the received tissue 3D image map, uses the virtual probe to define the scanning trajectory on the image map, and saves the position of the virtual probe in real time through the doctor end computer, and transmits it to the patient end through the network in the computer;
[0045] Step 3: According to the received scanning trajectory, the patient side controls the three-dimensional mobile platform to drive the probe to translate or rotate with the help of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More