

A positioning method and system for an underground trackless vehicle
A technology of trackless vehicles and positioning methods, applied in radio wave measurement systems, positioning, measuring devices, etc., can solve the problems of complex actual operations, failure to receive GPS signals, and low accuracy, so as to improve calculation accuracy, reduce errors, The effect of easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
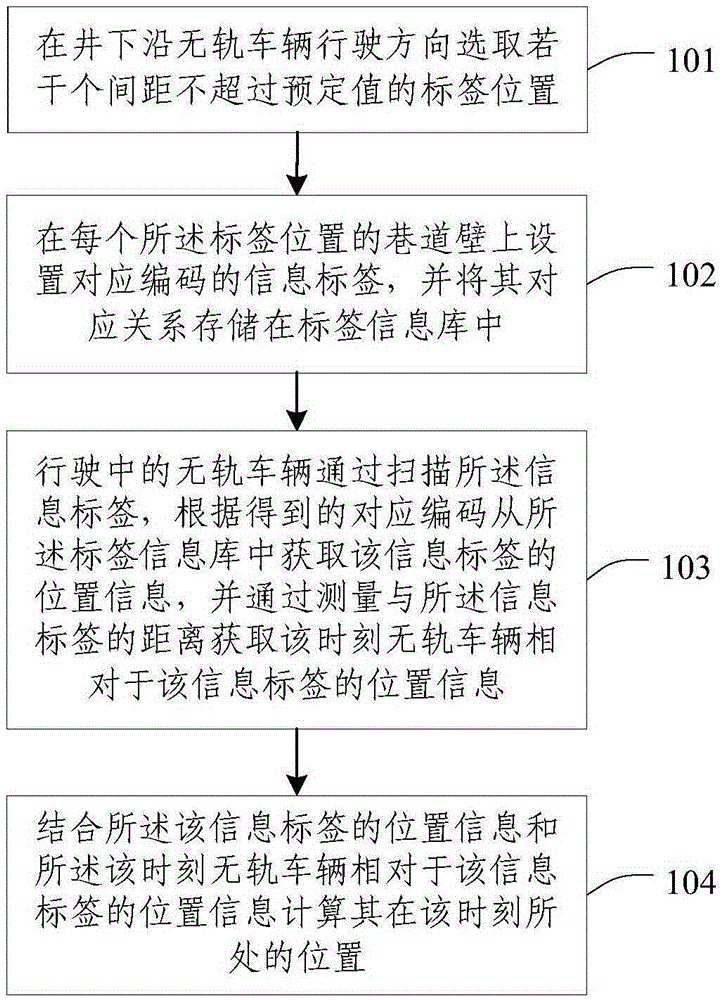
[0048] The embodiment of the present invention proposes a positioning method for underground trackless vehicles, see figure 1 , the method includes:
[0049] Step 101: select a number of label positions whose spacing does not exceed a predetermined value along the trackless vehicle traveling direction in the mine;
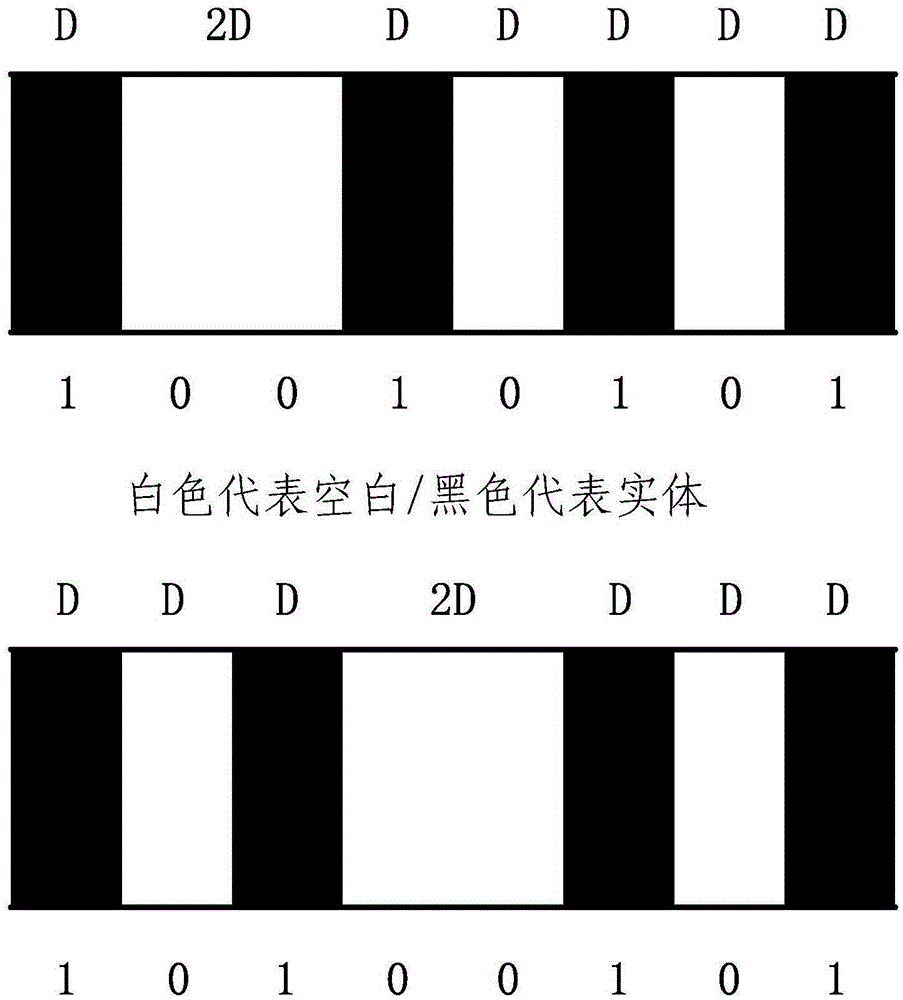
[0050] Step 102: setting a corresponding coded information label on the roadway wall at each label position, and storing the corresponding relationship in the label information database;
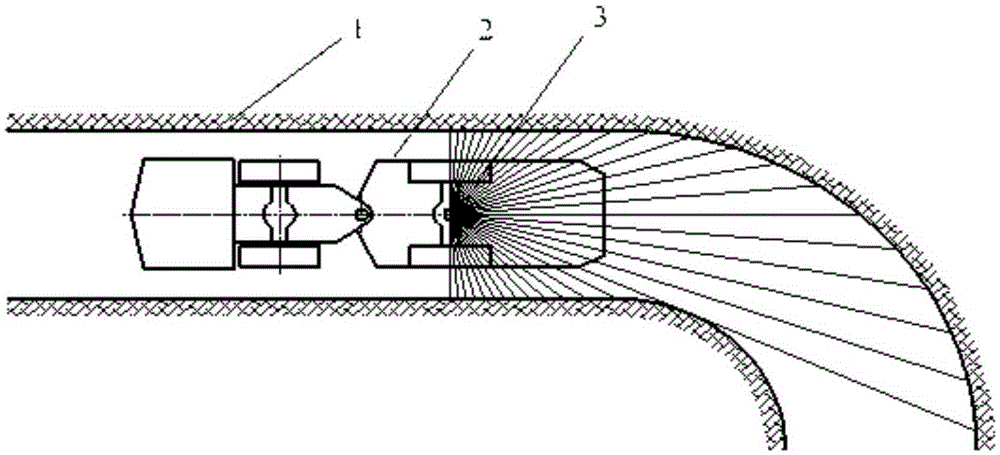
[0051] Step 103: The moving trackless vehicle scans the information label, obtains the position information of the information label from the label information library according to the obtained corresponding code, and obtains the trackless vehicle at that time by measuring the distance from the information label Position information relative to the information label;
[0052] Step 104: Combining the position information of the information tag and the position information of the...
Embodiment 2
[0097] The embodiment of the present invention proposes a positioning system for underground trackless vehicles, see Figure 7 , the system consists of:
[0098] The coded information label module 701 is used to select a number of label positions whose spacing does not exceed a predetermined value along the direction of trackless vehicle travel underground, and to set a corresponding coded information label on the roadway wall of each label position, and place it The corresponding relationship is stored in the tag information database;
[0099] The scanning distance detection module 702 is used for the trackless vehicle in motion to scan the information label, obtain the position information of the information label from the label information library according to the obtained corresponding code, and measure the distance between the information label and the information label. Get the position information of the trackless vehicle relative to the information tag at that moment;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More