

Vehicle locating method based on matching of road surface image characteristics
A vehicle positioning and image feature technology, applied in the field of image processing, can solve time-consuming and labor-intensive problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0173] In this implementation, a digital CCD camera modeled as SONY XCI-SX100C was installed vertically directly under the vehicle to capture road images in real time, and a 6-meter-long straight road section at the entrance of the School of Information, Chang’an University was selected as a test, shooting 30 frames per second; A total of 279 frames of road images were converted from the video, and the image size is 1280*960.
[0174] The uniform light processing is performed on the currently captured two consecutive frames of road surface images in sequence. The effect of a certain frame image after uniform light processing is as follows: figure 2 shown.
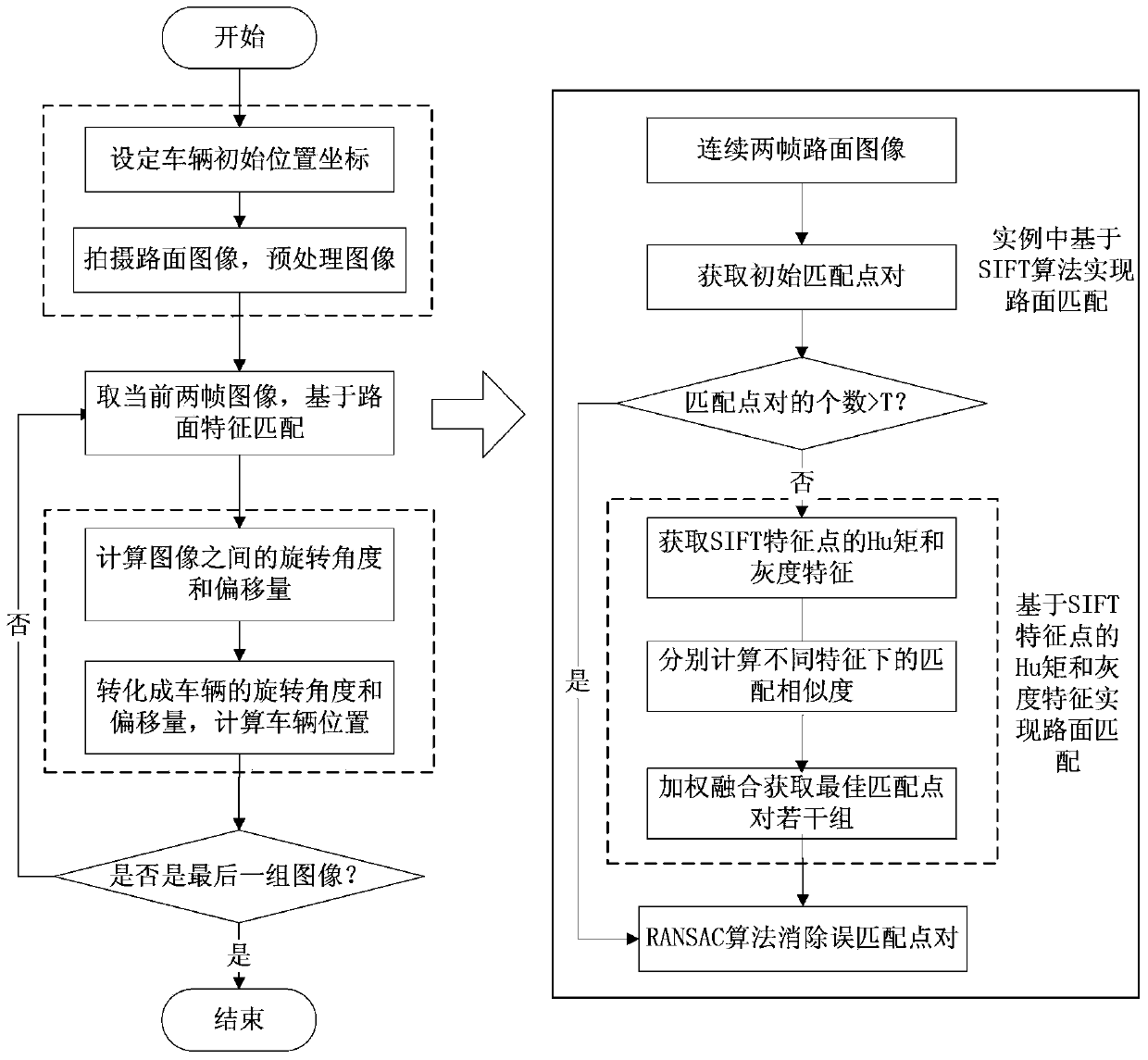
[0175] During the driving process of the vehicle, the captured road surface images are matched in real time, Figure 3-Figure 5 It is the rendering of road surface matching based on SIFT algorithm. When the SIFT algorithm is used, there are 42 groups of images (two consecutive frames of road images) where the number of m...
Embodiment 2
[0184] In this embodiment, a digital CCD camera modeled as SONY XCI-SX100C is vertically installed directly below the vehicle to take real-time images of the road surface, and a section of 12-meter-long turning section at the gate of the School of Information, Chang’an University is selected as a test, and a total of 682 Frame road image, the image size is 1280*960. The positioning process to the vehicle is the same as in embodiment 1, and the positioning track of the final vehicle operation is as follows Figure 9 (b) (the trajectory map of the vehicle running at the pixel level).
[0185] In summary, it can be seen that the method of the present invention realizes autonomous positioning based on road surface image matching, is not easily disturbed by the external environment, and has high accuracy.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More