

A waist device with hip joint parameter measurement suitable for exoskeleton-assisted support robots
A technology of auxiliary support and parameter measurement, which is applied in the field of service robots, can solve problems such as difficult to persist in independent combat for a long time and soldiers are exhausted, and achieve the effect of novel structure, good combination and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described in detail below in conjunction with the accompanying drawings.
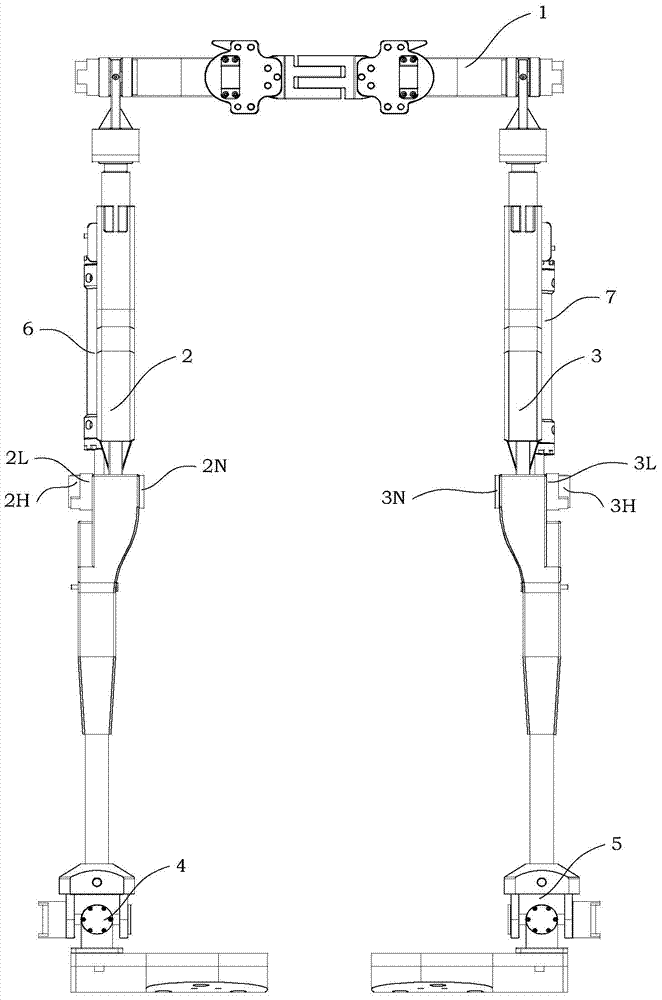
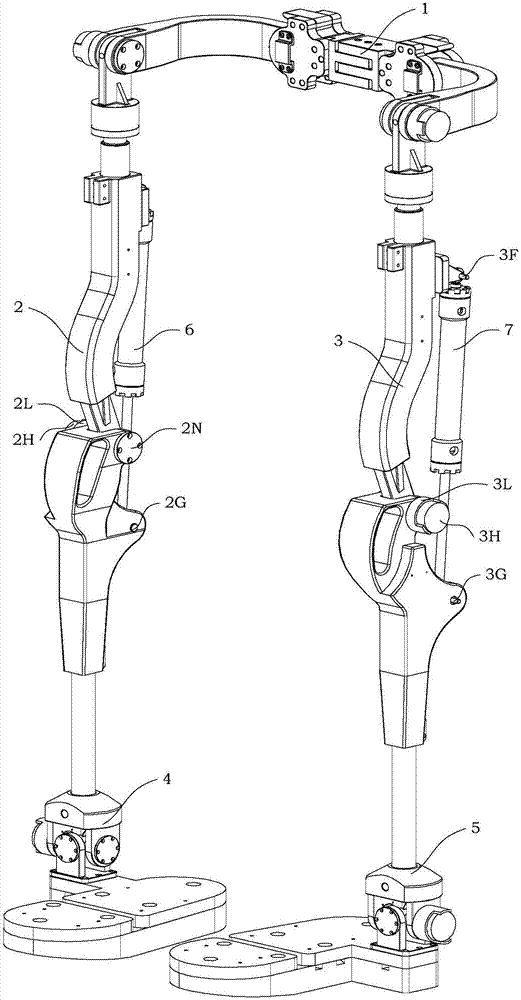
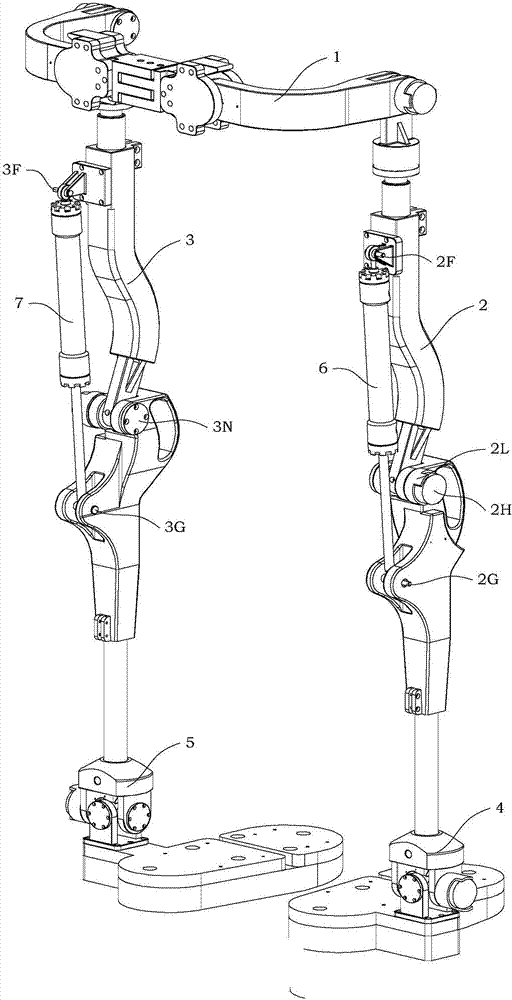
[0045] The present invention is an exoskeleton auxiliary support robot with joint parameter measurement, and the exoskeleton auxiliary support robot includes a waist device 1, a large and small leg device and a foot device. The large and small leg devices include a left leg assembly 2 and a right leg assembly 3; a left hydraulic cylinder 6 is installed on the left leg assembly 2, and a right hydraulic cylinder 7 is installed on the right leg assembly 3. The foot device includes a left foot assembly 4 and a right foot assembly 5 . The exoskeleton auxiliary supporting robot of the present invention is designed for simulating the characteristics of the waist, legs and feet of the human body.
[0046] In the present invention, the waist device 1 is designed with left and right hip joints. A left knee joint is designed in the left leg assembly 2, and a right kne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More