

Elastic hip joint rotating device for exoskeleton robot
The technology of an exoskeleton robot and a rotating device is applied in the direction of appliances to help people move, physical therapy, etc., which can solve the problems of the hip joint not being able to rotate in the vertical axis direction, and not having the function of limit protection and automatic reset, so as to avoid injury. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
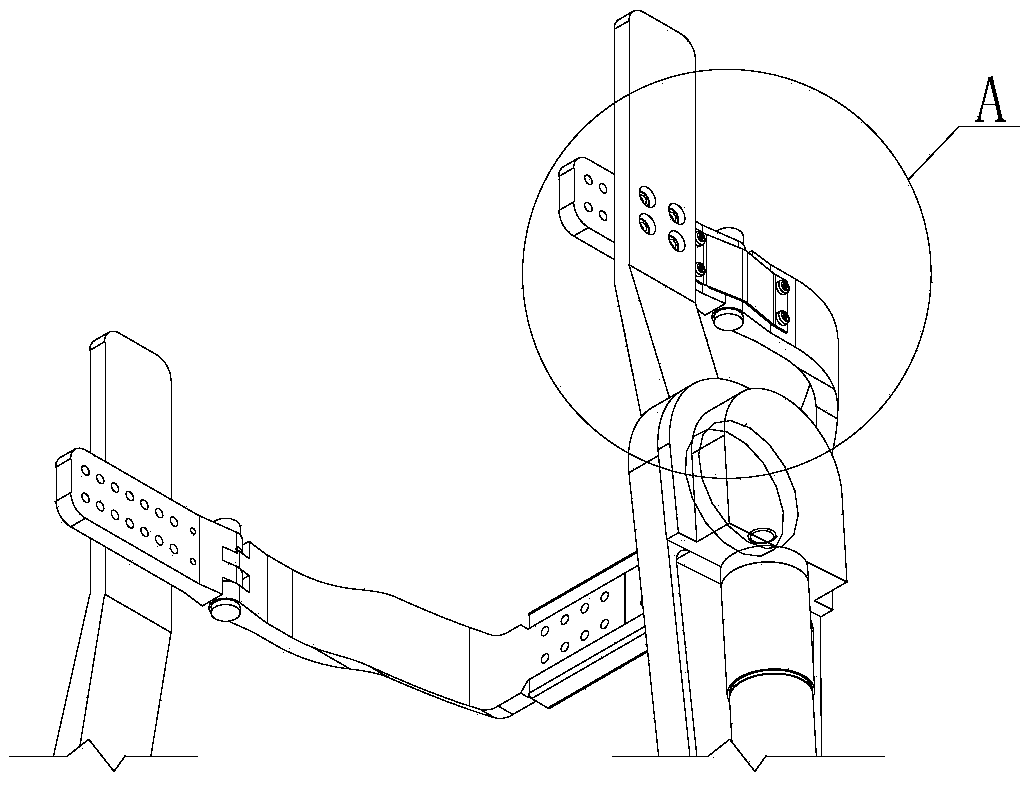
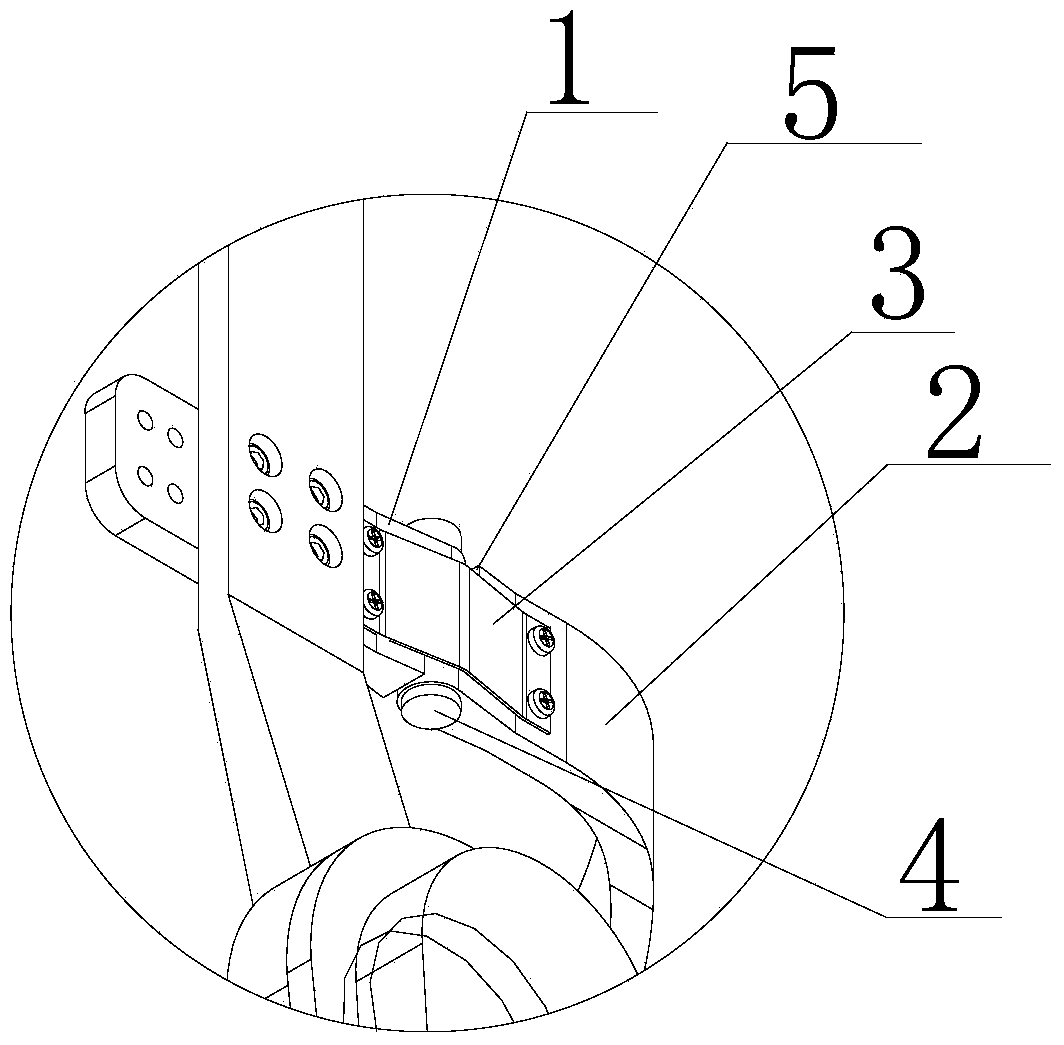
[0011] figure 1 with figure 2 An embodiment of an elastic rotation device for an exoskeleton robot hip joint of the present invention is shown: an elastic limit rotation device for an exoskeleton robot hip joint, comprising a hip joint fixing plate 1, a back fixing plate 2, a spring steel sheet 3 and Rotating pin 4, wherein the hip joint fixing plate 1 and the back fixing plate 2 are connected to each other through the vertical rotating pin 4, and the hip joint fixing plate 1 and the back fixing plate 2 are connected through the spring steel sheet 3 The two outer sides of the rotating pin 4 are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More