

Vector propulsion mechanism of underwater robot
An underwater robot and propulsion mechanism technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult to adapt to the deep-sea heavy pressure environment, small working space, difficult to apply and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
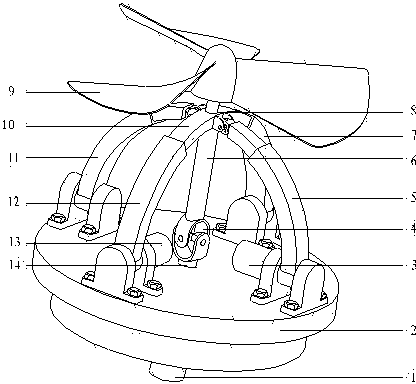
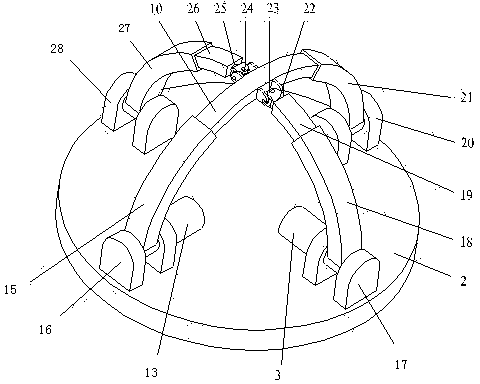
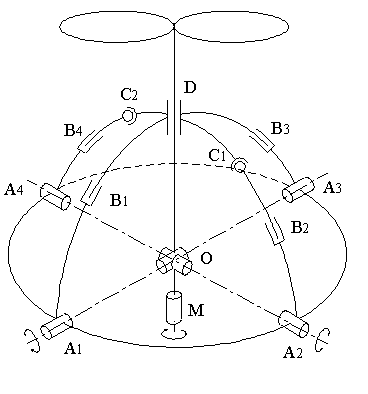
[0009] The structure of the embodiment of the present invention is as figure 1 As shown, the disc base 2 is used as the static platform, and the arc-shaped slider 10 is used as the dynamic platform. There are 4 sets of motion branch chains between the dynamic and static platforms, which are respectively two sets of RP C Branch 7, 12 and two sets of RP C RU branch chain 5, 11, where RP C Branched 12 and RP C The RU branch chain 5 is an active branch chain, the ends of which are respectively connected to the servo motors 13 and 3, and the other two sets of motion branch chains, namely RP C branched chain 7 and RP C The RU branch chain 11 is a passive branch chain, which plays the role of increasing rigidity and reducing unbalanced force. The four groups of motion branch chains all include a curved moving pair P with an arc-shaped groove sliding structure C , the four sets of kinematic branch chains are located on the same spherical surface and are installed at intervals of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More