

Three-axis active posture control method for space tether-robot
A technology of tethered robots and space tethers, which can be applied in attitude control and other directions, and can solve difficult problems such as realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
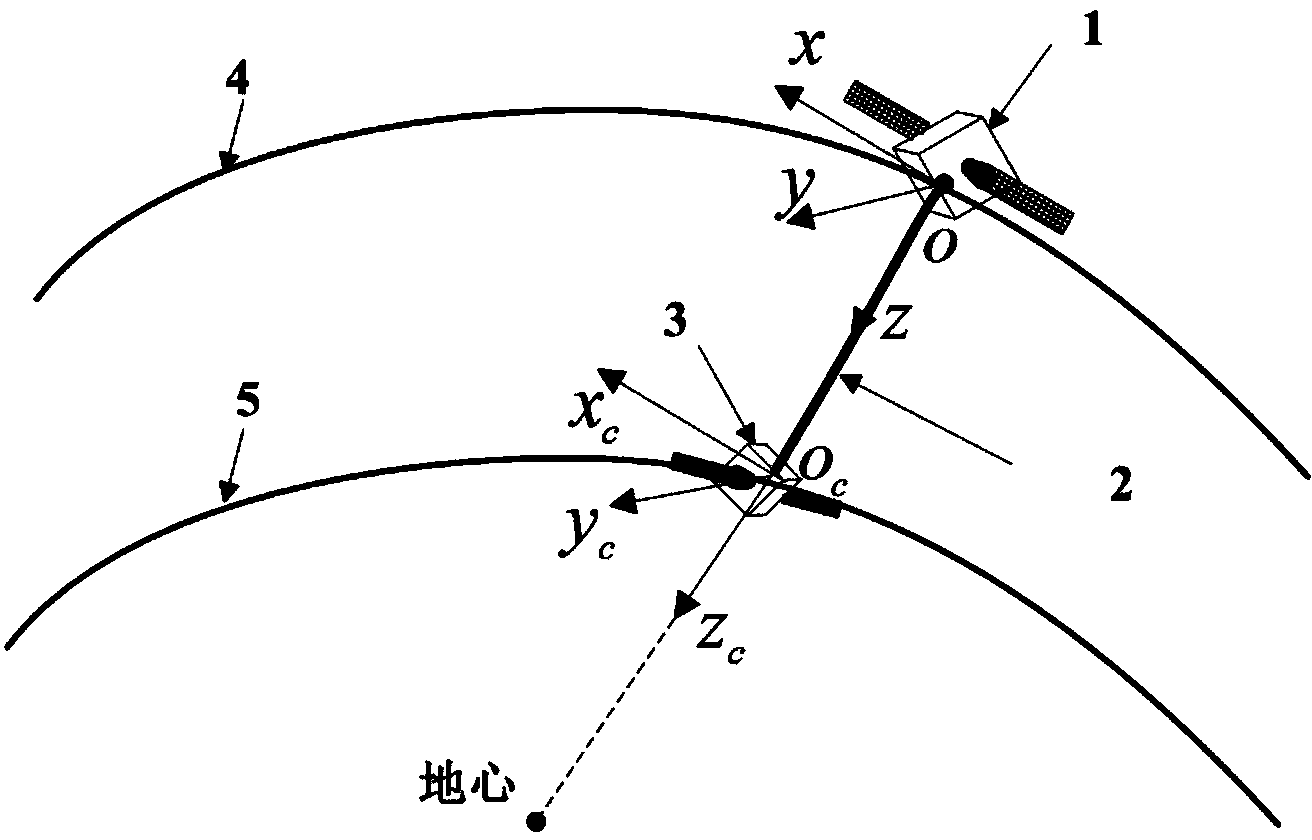
[0025] The implementation of the present invention will be described below with reference to the accompanying drawings. In this embodiment, the space tethered robot is located on the line connecting the space platform and the center of the earth.
[0026] In the analysis process, firstly, the orbital dynamics characteristics of the space tethered robot give the space tethered robot the nominal tension T 0 ;
[0027] In the orbital coordinate system oxyz of the space tethered robot, the motion of the space tethered robot can be expressed by the Hill equation (Formula (1)-(3)):
[0028] x · · - 2 Ω z · = F x / m r - - - ( 1 )
[0029] y · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More