

A wheeled quadruped robot
A quadruped robot and foot-wheeled technology, which is applied in the field of mobile robots, can solve the problem of unable to achieve a smooth transition between wheels and legs, and achieve the effects of good economical value, improved speed and strong adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
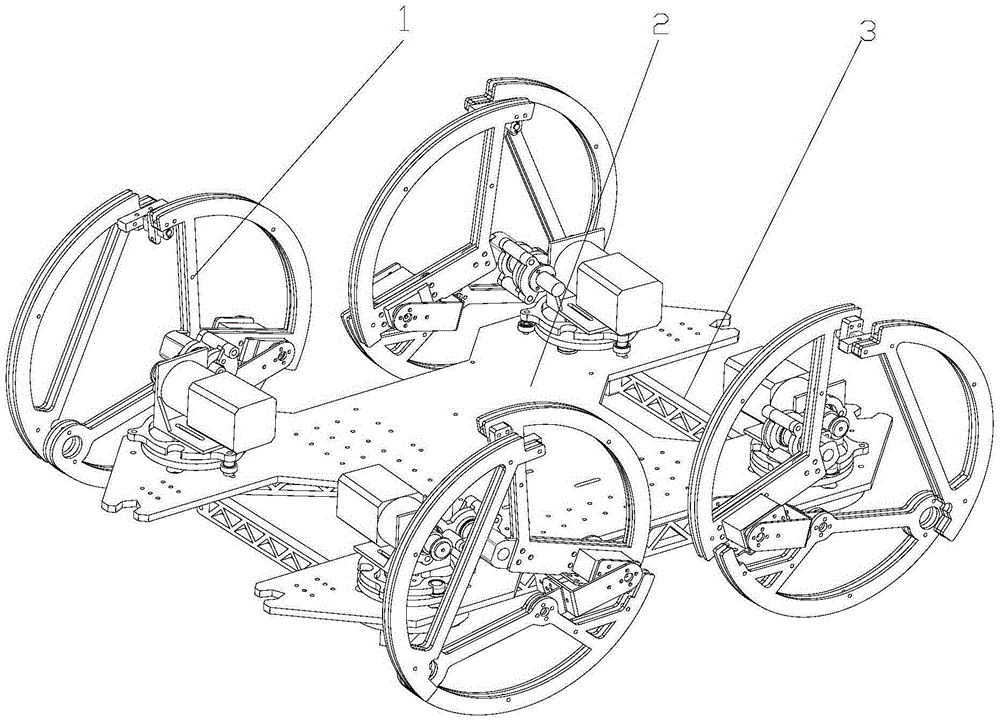
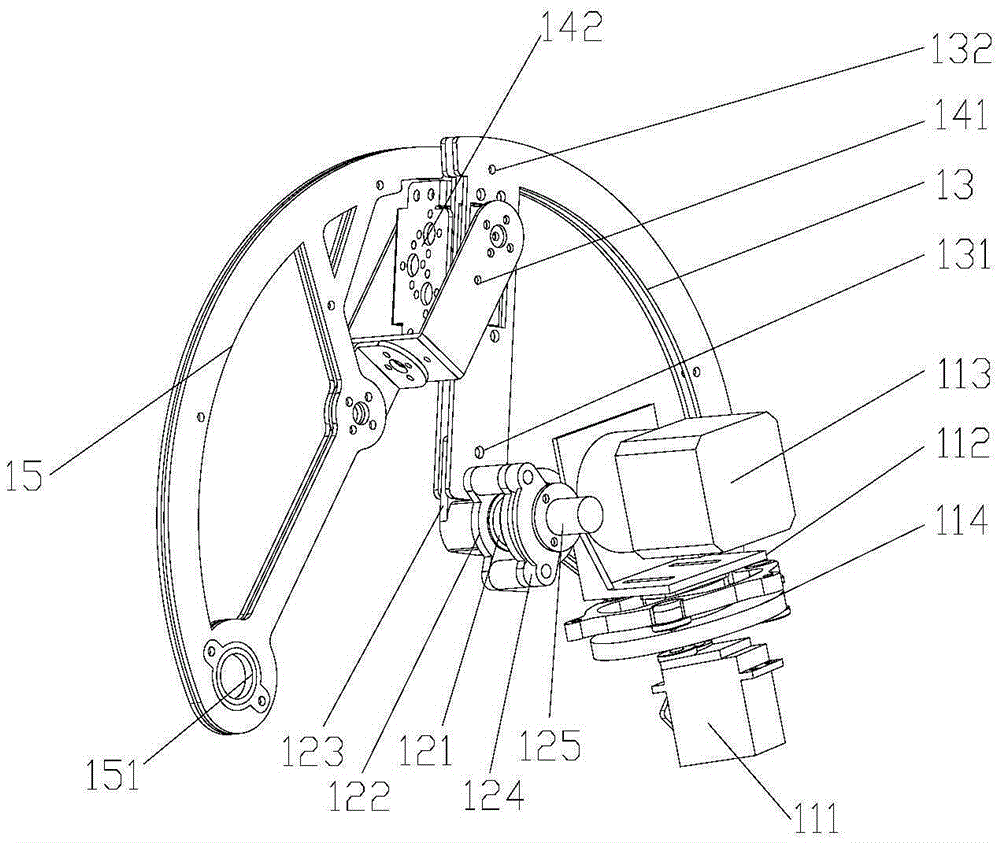
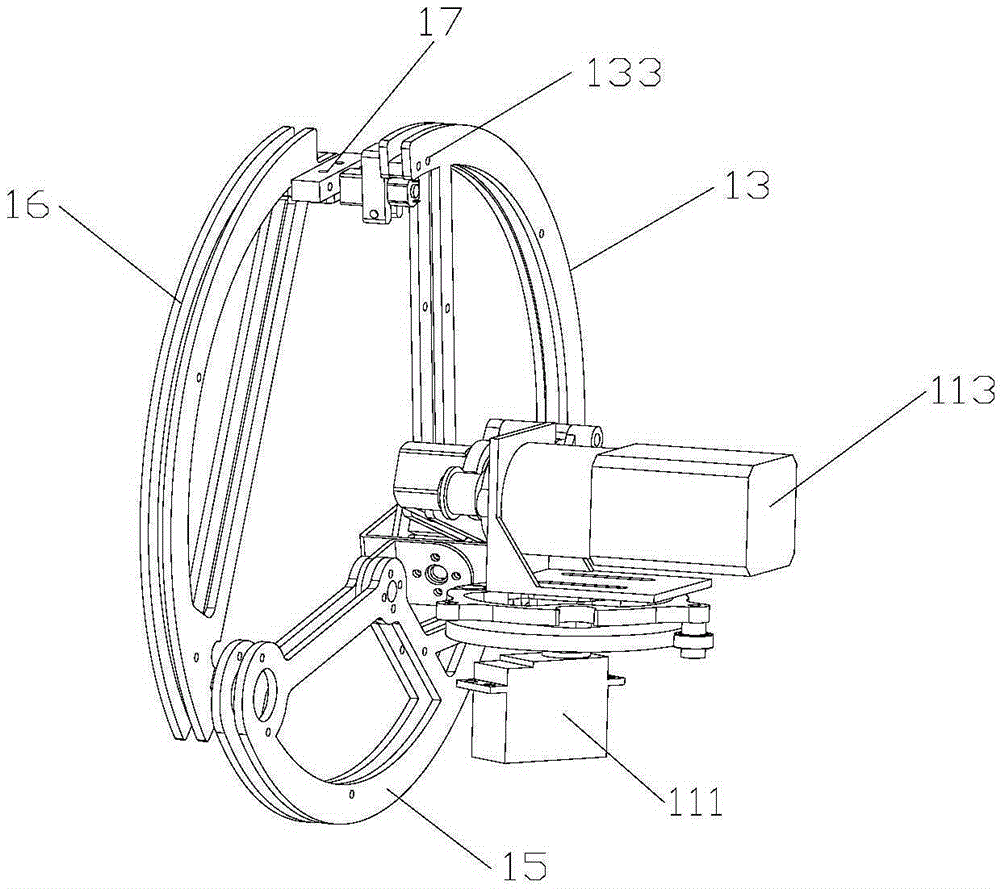
[0017] Such as Figure 1 to Figure 3 As shown, the technical solution of the present invention is: a kind of foot wheel type quadruped robot, comprises trunk 2, and trunk bracket 3 is installed on the bottom of trunk 2, and four three-degree-of-freedom foot wheel motion branch chains are installed on described trunk 2 1. Foot wheel motion branch chain 1 includes horizontal hip joint, vertical synchronous wheel hip joint, wheeled thigh 13, wheeled knee joint, wheeled calf 15 connected in sequence, and horizontal hip joint includes rotation device A111 and actuator bracket 112. Actuator 113, the rotating device A111 is directly fixed on the torso, the rotating device A111 is connected to the actuator bracket 112, the actuator 113 is installed on the actuator bracket...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More