

Method for calibrating intrinsic parameters of camera through parallelograms
A camera internal parameter, parallelogram technology, applied in image data processing, image analysis, instruments, etc., can solve the problems of high calibration conditions and lack of wide applicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
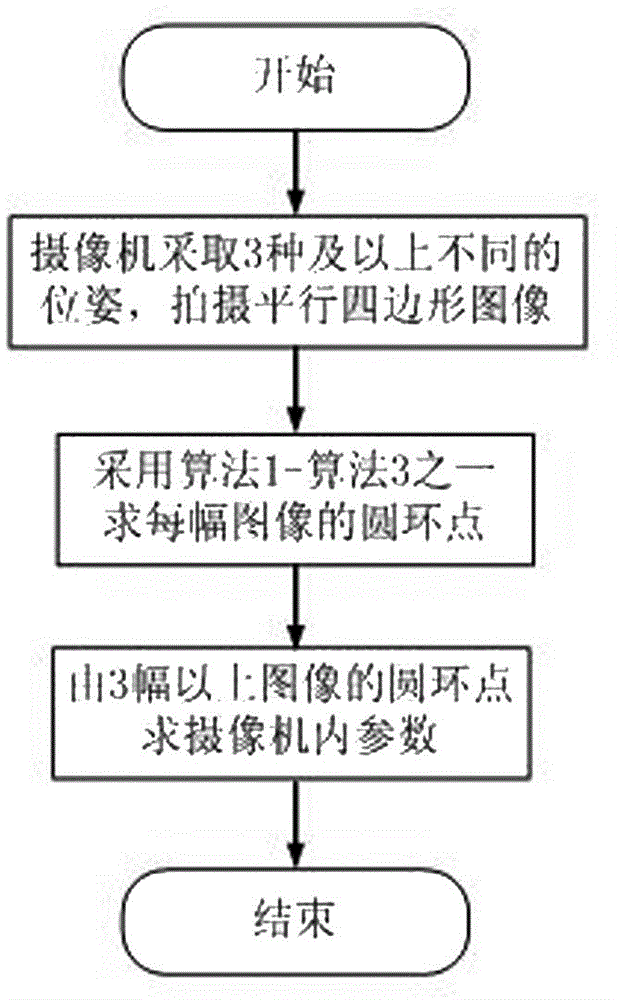
[0096] See figure 1 As shown, a method for calibrating internal parameters of a camera using a parallelogram is characterized in that it comprises the following steps:
[0097] (1) Use the camera to take three or more different poses, and shoot a parallelogram image in each pose;
[0098] (2) Determine the calibration scheme according to the number and positional relationship of parallelograms in the parallelogram image:
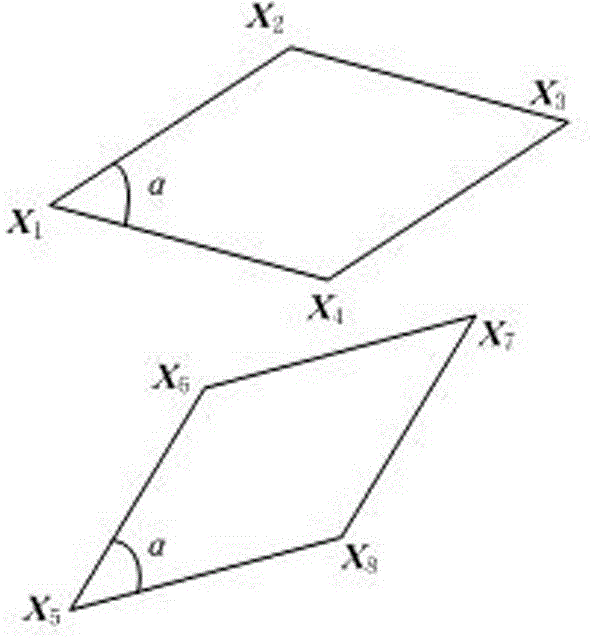
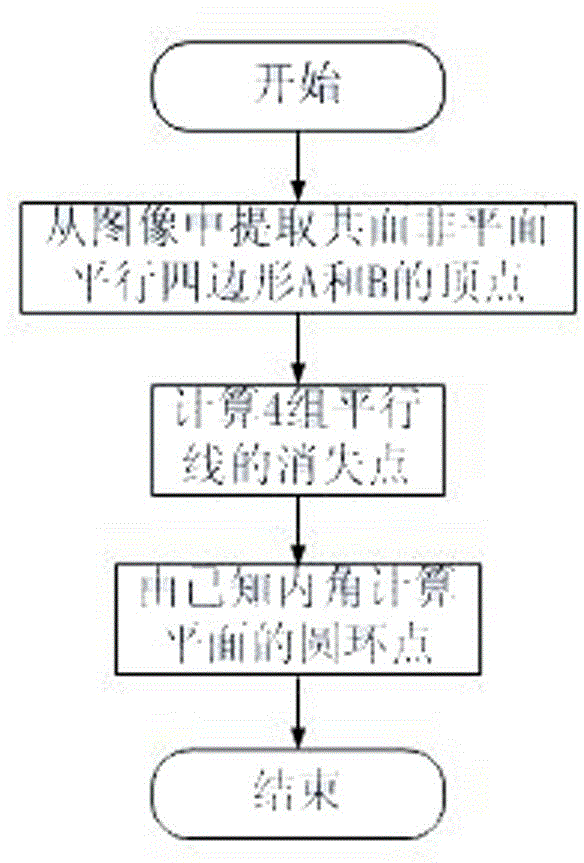
[0099] ①If the parallelogram image is two non-parallel parallelograms with equal internal angles and known internal angles, four vanishing points are obtained from four sets of parallel lines, and the known internal angles are obtained according to Laguerre's theorem Find the coordinates of two ring points with four vanishing points;
[0100] ②If the parallelogram image is two parallel parallelograms whose corresponding internal angles are known but not equal, three vanishing points are obtained from three sets of parallel lines, and according to Lague...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More