

Closed-loop Kalman filter inertial positioning method based on zero-speed correction
A Kalman filter and Kalman filter technology, which is used in navigation, navigation, instruments and other directions through velocity/acceleration measurement, which can solve the problem of inability to realize error estimation, and achieve the effect of high coincidence and high positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
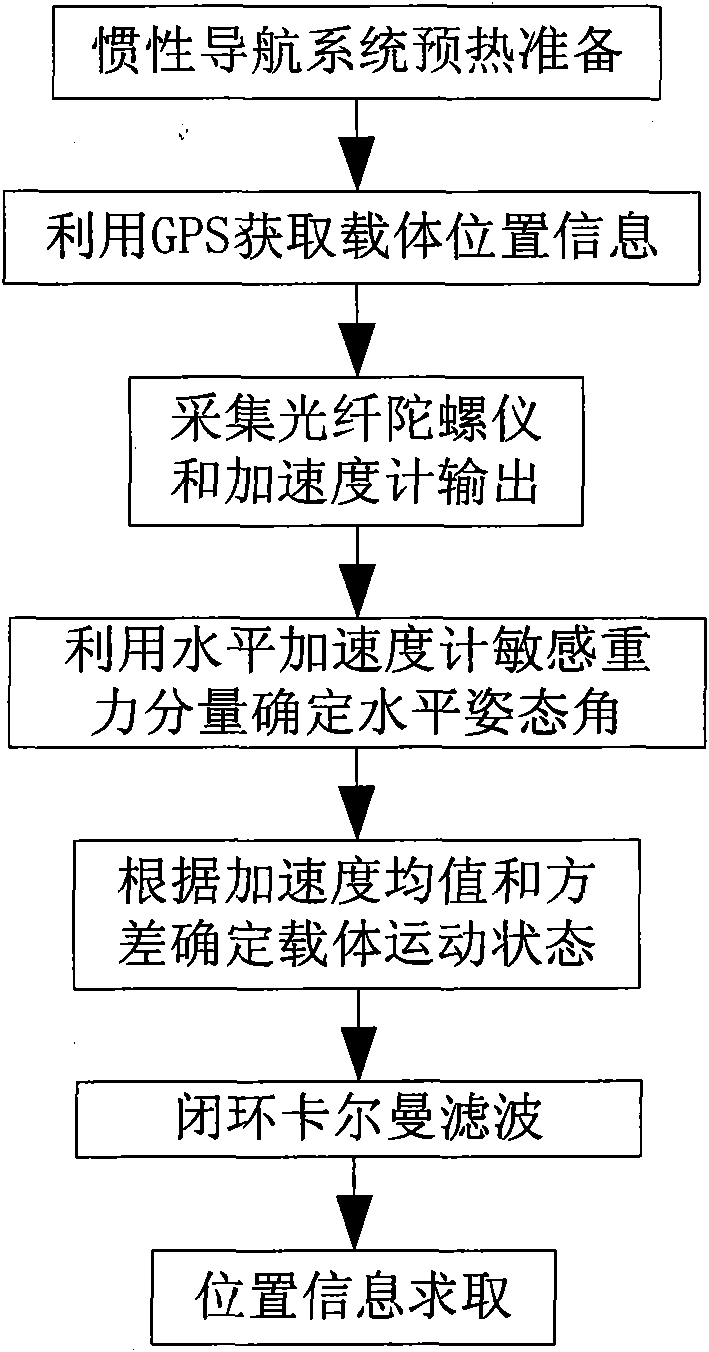
[0058] The specific embodiment of the present invention is described in detail below in conjunction with accompanying drawing:
[0059] (1) Utilize the global positioning system GPS to determine the initial position parameters of the carrier, and bind them into the navigation computer;
[0060] (2) The system prepares for warm-up, collects the data output by the gyroscope and the accelerometer and processes the data;
[0061] (3) Initial alignment of the inertial navigation system;
[0062] According to the output of the accelerometer, the horizontal alignment can be completed, and the initial pitch angle and roll angle can be calculated from the output of the accelerometer. The calculation formula is as follows:
[0063]
[0064] In the formula: g 0 is the gravitational acceleration on the ground surface, f x , f z respectively represent the specific force information output by the accelerometer in the x and y directions, θ and γ respectively represent the estimated re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More